Implementujte simulátor robotu z úkolu DU-04 v MATLAB Robotic Toolbox.
Robotický toolbox po rozbalení přidáte do cesty:
addpath('robot');
Robota (s rotačními klouby) vytvoříte pomocí příkazu:
L{1} = link( [ alpha, a, 0, d, 0, theta_offset ], 'standard' );
L{2} = ....
.
.
.
r = robot( L, 'PRO', 'name', '' );
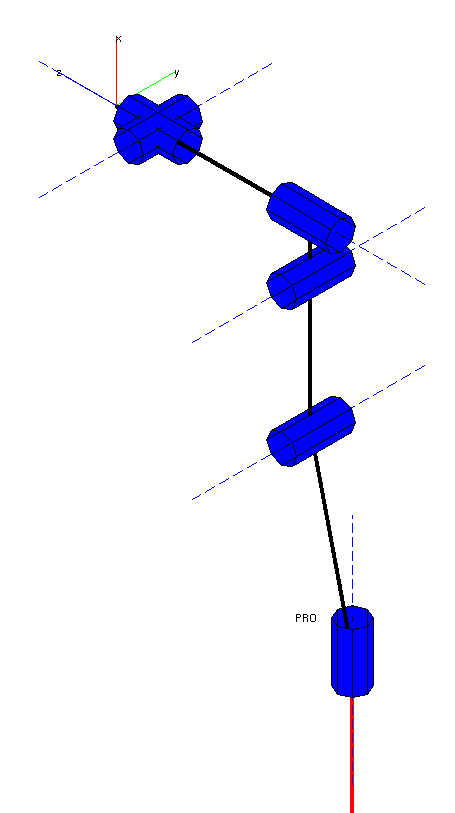
Robota zobrazíte pomocí příkazu (vzorový výstup):
drivebot(r); view([1;1;1]);
Vypracovanou úlohu tvoří zip archiv obsahující:
Zpět na stránky předmětu.
{kind=link}