
Parametry použité vyučujícím
Zimní semestr 2009/2010.
Byl použit detektor z knihy Tomáš Svoboda, Jan Kybic , and Václav Hlaváč: Image Processing, Analysis, and Machine Vision: A MATLAB Companion (http://visionbook.felk.cvut.cz). Kód detektoru je ke ztažení v příloze páté kapitoly. Kniha je k dispozici v knihovně CMP.
der_sigma = 1. Derivative scale - standard deviation of the
Gaussian filter used for pre-smoothing.
int_sigma = 2. Integrative scale - standard deviation of the Gaussian
filter used for summing over the pixel neighborhood.
threshold = 100. Corner response function threshold. Values of the corner
response function below this threshold are neglected.
V každém obrázku bylo z bodů nadetekovaných funkcí harris
vybráno 1500 nejlepších bodů. Body blízko kraji obrázku byly zahozeny (aby se
při výpočtu NCC nemuselo hlídat vytečení okna mimo obraz).
maxdist = 750. Maximální možná vzdálenost mezi body
(kandidáty).
wsize = 9x9. Velikost okna.
maxerror = 1.5. Tolerance pro určení inliers.
maxiter = 20000
L = -70
H = 20
Number of input points: Ni x Nj. Počet detekovaných bodů v prvním a druhém obraze.
Tentative correspondences. Počet nalezených kandidátů.
Support. Počet inliers, v závorce vždy číslo iterace kdy
došlo ke zlepšení (nalezení lepší čveřice/homografie).
Posledni snimek:
Log pro sledování obasti na zdi při běhu po 50ti snímcích je zde.
Prvni snímek po transformaci:

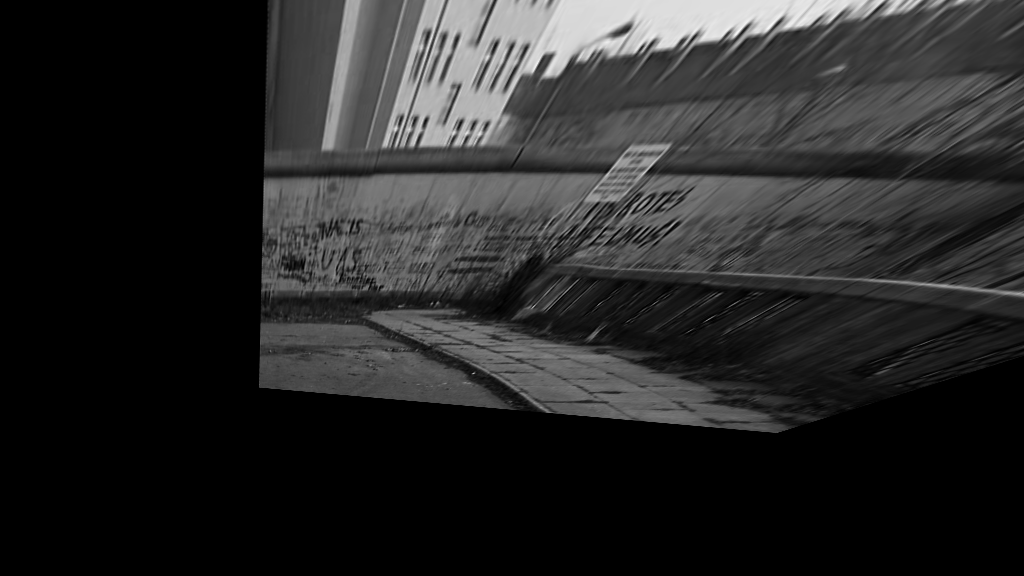
Rozdíl mezi posledním a prvním snímkem po transformaci:

Log pro sledování obasti na zdi při zpracování všech snímků je zde. Z logu je vidět že počet inliers je kolem 70% a RANSAC poměrně rychle konverguje. Na zdi se již akumuluje drobná chyba, která ke konci sekvence kolem jednoho pixelu v levé části zdi, v pravé části zdi je chyba vetší.
Prvni snímek po transformaci:

Rozdíl mezi posledním a prvním snímkem po registraci:

Log pro sledování obasti na zdi při zpracování všech snímků je zde. Z logu je vidět že počet inliers je kolem 80% a RANSAC poměrně rychle konverguje. Chyba, která se v homografiích postupně akumuluje je větší než v předchozím případě. To může bých způsobeno volbou parametrů. Také k tomu může přispět špatný předpoklad o (ideální) rovnosti zdi a chybějící data (body) v oblasti zakryté pánama (je vidět, že levá část zdi sedí lépe).
Prvni snímek po transformaci:
Rozdíl mezi posledním a prvním snímkem po registraci:

Poslední změna 18. 12. 2009