Automatický odhad homografie metodou RANSAC
V této úloze se vrátíme k odhadu homografie z
první úlohy,
ale korespondence místo ručního označení nalezneme
KLT trackerem
spuštěnou na více bodech (řádově desítky) prvního obrazu.
V nalezených korespondencích budou chybné páry, tzv. outliery.
Protože odhad homografie metodou nejmenších čtverců funguje
spolehlivě pouze na datech bez outlierů, obalíme ho
metodu RANSAC z přednášky pro nalezení řešení
podporovaného největší podmnožinou korespondencí.
Postup
Stáhněte si obrazy sejmuté AVbotem během posunu
AVbot-translation-sequence.zip,
jméno obrazu odpovídá pozici v milimetrech. Nejdříve začněte s dvojicí obrazů,
mezi nimiž je malý posun (<=10mm). Pokud vám přestanou
fungovat funkce rgb2gray(), im2double(), použijte pro převod
obrazu na šedotónový jednoduché průměrování přes kanály:
im=mean(double(im)/255,3).
- zvolení
n sledovaných bodů x1 v prvím obraze
- nalezení pozice
x2 v druhém obraze KLT trackerem pro všechny body x1
- pokud si nejste jisti svojí implementací výpočtu gradientu,
můžete použít funkci
gradient()
- pokud máte problémy s konvergencí, testujte nejen velikost posunu
v poslední iteraci, ale porovnávejte i velikost posunu
v poslední iteraci oproti velikosti posunu za posledních deset
iterací, tj. máte-li pozice z každé iterace
i uložené v matici
P [2xN], pak porovnávejte v iteraci i>10:
norm(P(:,i)-P(:,i-10)) > 2*norm(P(:,i)-P(:,i-1))
- RANSACem odhadněte homografii, v každé iteraci k:
- vyberte čtveřici Sk z množiny U korespondujícíh párů
x1↔x2,
můžete použít první čtyři indexy z permutace randperm()
- spočítejte z nich homografii Ak vaší funkcí
calcA()
(Ak odpovídá parametrům modelu θk z přednášky)
- transformujte všechny body
x1 transformací Ak
a najděte support-set, tj. množinu bodů v toleranci tol
od korespondujících bodů x2
- pamatujte si homografii A* s dosud největším support-setem
(jeho velikost odpovídá ceně Ck z přednášky)
- RANSAC ukončete pokud k > K, kde K je adaptivně snižovaný
(vždy při nalezení nového největšího support-setu) počet iterací potřebný
k vybrání čtveřice bez outlierů s pravděpodobností P, viz vzorec z přednášky
- pro kontrolu transformujte funkcí
imtransform()
první obraz nejlepší homografií A* a zobrazte na
něm posuny bodů funcí quiver()
| vstupní dvojice obrazů 320×240px sejmutá AVbot-em
z pozic [0mm,0st] a [20mm,0st] |

|

|
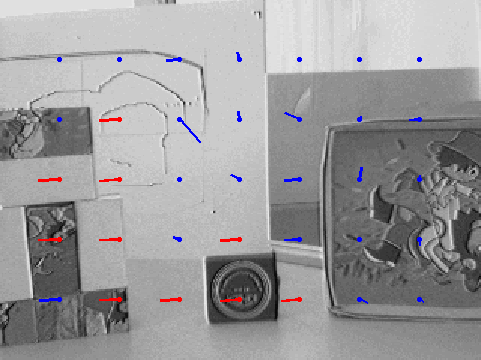
posun na 35 bodech nalezený KLT trackerem s patchem 45×45px,
výběr support-setu (červené vektory) RANSACem s tolerancí 0.5px
všimněte si, že většina korespondencí byla nalezena špatně, přesto RANSAC
našel správný support-set
|
|
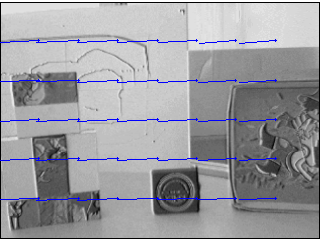
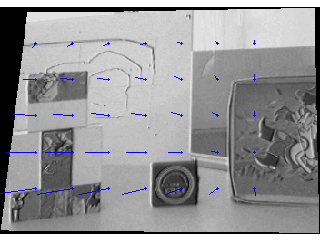
homografie aplikovaná na první obraz, srovnání s použitím RANSACu
a bez něj (LSE na všech bodech)
modré vektory ukazují směr posunu
|
|
|
Odevzdávaná úloha
- Implementujte sledování více bodů rovnoměrně rozložených po obraze. [3b]
- Zobrazte posuny bodů. [1b]
- Implementujte robustní odhad homografie metodou RANSAC. [3b]
- Ukončujte RANSAC při dosažení požadované pravděpodobnosti nalezení
nekontaminovaného odhadu, viz Postup (3.5). [1b]
- Otestujte svůj odhad homografie: zobrazte první obraz transformovaný
touto homografií, zobrazte na něm posuny bodů (teď už vypočtené
z homografie, ne zjištěné sledováním). Do jaké velikosti baseline odhad
funguje? [1b]
- Pokuste se změnou vhodného parametru zvýšit možnou velikost baseline. [1b]