Podívejte se znovu na rovnice
popisující Radonovou transformaci (1) a zpětnou projekci (2).
Projděte si téz slidy z
přednásky a prostudujte si Iterativní rekonstrukci (slide 77+).
Stáhněte si matici radon.mat, obsahující Radonovu transformaci Shepp-Loganova fantomu (viz. obrázek napravo). Takto vypadají raw-data z X-Ray CT a Vasím úkolem bude zrekonstruovat z těchto dat původní obrázek. Na obrázek z radon.mat obsahující obrazovou funkci J(p,θ) se budeme odkazovat pod názvem imgCT.
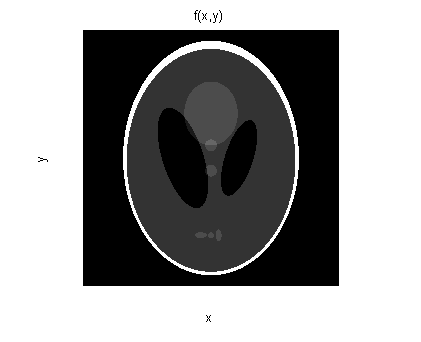
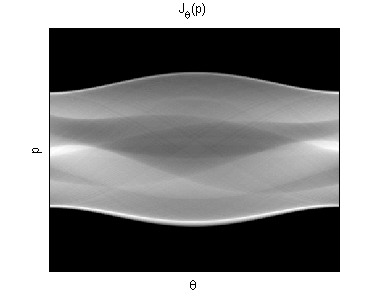
Shepp-Loganův fantom Raw-data z X-Ray CT
Iterativní rekonstrukce
Principem iterativní rekonstrukce je aplikování korekcí na libovolné počáteční hodnoty pixelů v rekonstruovaném obrázku tak, aby po provedení Radonové transformace na rekonstruovaný obrázek bylo dosazeno shody se vstupními daty.
Zvolíme počáteční odhad rekonstruovaného obrázku f0(x,y) = 0 o velikosti NxN pixelů.
Pro kazdé θ postupně provedeme aktualizaci rekonstruovaných hodnot:
Stáhněte si matici radon.mat, obsahující Radonovu transformaci Shepp-Loganova fantomu (viz. obrázek napravo). Takto vypadají raw-data z X-Ray CT a Vasím úkolem bude zrekonstruovat z těchto dat původní obrázek. Na obrázek z radon.mat obsahující obrazovou funkci J(p,θ) se budeme odkazovat pod názvem imgCT.
Shepp-Loganův fantom Raw-data z X-Ray CT
Iterativní rekonstrukce
Principem iterativní rekonstrukce je aplikování korekcí na libovolné počáteční hodnoty pixelů v rekonstruovaném obrázku tak, aby po provedení Radonové transformace na rekonstruovaný obrázek bylo dosazeno shody se vstupními daty.
Zvolíme počáteční odhad rekonstruovaného obrázku f0(x,y) = 0 o velikosti NxN pixelů.
Pro kazdé θ postupně provedeme aktualizaci rekonstruovaných hodnot:
- Spočítáme Radonovou transformaci pro θ a pro vsechny posuny p - Jk(p,θ) = R[fk(x,y)] - viz rovnice (1).
- Porovnáme Jk(p,θ) se skutečnou Radonovou transformací obrázku zadanou na vstupu J(p,θ).
- Rozdíl J(p,θ)-Jk(p,θ) vydělíme váhovou funkci w(p,θ) udávající přes kolik pixelů na paprsku (p,θ) byla provedena projekce. Takto získáme přibliznou chybu pro kazdý pixel lezící na paprsku (p,θ).
- Pro kazdý pixel lezící na paprsku (p,θ) provedeme aktualizaci jeho hodnoty fk+1(x,y) = fk(x,y) + (J(p,θ)-Jk(p,θ))/w(p,θ)*pi/(2*Nθ).