Aubrecht Emil, Kocián Jan 17.5.2000
PVI - úloha 2
Rekonstrukce scény
Úkoly
Pomocí MatLabu rekonstruujte scénu ze dvou obrázků objektu sejmutých kamerami, když mezi body je známá korespondence.
Potřebná data
dva vyhovující obrázky
Obecný postup
Řešení úlohy lze rozložit na následující části:
1. Příprava dat
Pomocí modulu corrgui jsme ve dvou vstupních obrázcích vybrali několik (15) korespondujících bodů a jejich souřadnice uložili k dalšímu zpracování. Máme tedy obrazové body (u=( ui, vi, 1), u’=( ui‘, vi‘, 1)). (v obrázku vypadají takto: *****)
2. Výpočet fundamentální matice Q
Fundamentální matice nám poskytuje korespondenci mezi oběma
prostory: uT.Q.u’=0.
Po úpravách získáme rovnici ve tvaru A.q=0,
kde A je matice nx9, q vektor 9x1
z matice Q (Q11, Q12,
...), ![]() ,
,
Pro řešení výsledné rovnice (soustavy) nám postačí zadání 8 bodů, pro a více
bodů je již soustava přeurčená. Pro 8 bodů lze tedy vyřešit zadanou soustavu, pro
větší počet bodů je nutno použít přibližnou metodu výpočtu, která nám nalezne
matici “co nejbližší“ matici k matici A
s hodností 8 - například Singular Value Decomposition (SVD).
V praxi se nám osvědčilo k výpočtu použít co nejvíce bodů (všechny).
3. Výpočet epipolár l, l‘ a epipólů e, e’
Epipoláry
určíme pomocí fundamentální matice Q a
souřadnic naklikaných (obrazových) bodů: l=Q.u’, l‘=uT.Q. Získané epipoláry zobrazíme jako úsečky
do zdrojových obrázků (jeden bod zvolíme druhý na základě l resp l‘
dopočítáme) (v obrázku: -----).
Homogenní souřadnice epipólů e, e’ nalezneme ve třetích sloupcích
matic U, V, získaných SVD fundamentální matice Q ([U.S.V] =
svd(Q))(v obrázku: *****).
4. Rekonstrukce geometrie skutečné scény ze zadaných P, P’
Použity
jsou předem známé projekce kamer P, P’ ze souboru pointcal_mat.mat. Víme, že
obrazový a reálný prostor jsou svázány projekčními maticemi: a.u=PX, a’.u’=P’X, kde X jsou souřadnice rekonstruované
scény a a, a’ nějaká
nenulová reálná čísla.
Označíme P=(A | b) a P‘=(A‘ | b‘), kde matice A, A’
mají velikost 3x3 a sloupcový vektor b, b’ 3x1. Hledané X’, X’’ získáme jako
řešení následujících rovnic: (nejprve určíme a, a’ a poté
zpětným dosazením X’, X’’)
Výsledné souřadnice skutečné scény X vypočítáme jako průměr X’, X’’ a
zobrazíme ve 3D (v obrázku: ****).
V praxi se průměrování (které nemá fyzikální opodstatnění) patrně
projeví na chybě při rekonstrukci!
Nyní provedeme zpětnou projekci skutečných bodů do obrazu, tedy newu=P.X, newu’=P’X, po normalizaci zobrazíme (v obrázku: ****)
5. Výpočet
vlastních projekčních matic myP, myP’ a rekonstrukce scény pomocí nich
Provedeme volbu: myP=(I(3,3) | O(3,1)),
kde I je jednotková matice a O je nulová matice. Druhá projekční matice má
tvar: myP’=(A | b), kde matice A=(a1, a2, a3)
má velikost 3x3 a b je sloupcový vektor 3x1 (jedná se o jiné proměnné než
v bodě 4!), b má hodnotu b=e’.
Z rovnosti Q.A=-AT.QT (Q.A
je antisymetrická matice) dostáváme 6 rovnic
o 9 neznámých: W.a=0, matice W (6x9),
koeficienty f1, f2, f3 jsou řádky fundamentální matice Q:
Provedením SVD matice W ([U D V] = svd(W)), se
v 6 až 9 sloupci vzniklé matice V nalézají
a1 a2, a3, a4,
(báze jádra W). Naše hledané a je
jejich lineární kombinací (s koeficienty a1, a2, a3, a4).
Nyní se pokusíme najít takovou kombinaci a1, a2, a3, a4,
aby požadovaná matice A bylo co nejvíce
regulární (zjistíme opět pomocí SVD, kdy ve vzniklé matici D, chceme maximalizovat
poměr posledního prvku na diagonále ku prvnímu). Z matice A a sloupcového vektoru b sestavíme myP’.
Analogicky s bodem 4 pomocí nových projekčních matic myP, myP’
vypočteme souřadnice v (projektivně) rekonstruované scéně myX (ty ovšem nemá smysl
zobrazovat) a opět provedeme zpětnou projekci do obrazu a zobrazíme (v obrázku: oooo).
6. Výpočet
transformační matice H
Transformační matice H (4x4) nám svazuje
souřadnice (projektivně) rekonstruované scény (myXi) se souřadnicemi
skutečné scény (Xi): mi.myXi=H.X i. Po dosazení myXiT=(xi
yi zi wi), XiT=(![]() ), mi jsou reálná čísla, a přepisu soustavy
dostáváme:
), mi jsou reálná čísla, a přepisu soustavy
dostáváme:

velká matice Z je pro 5 bodů velikosti
20x21. Vyřešením soustavy pro naše body (opět využijeme též SVD) získáme
požadované H.
V praxi byl patrný vliv počtu použitých bodů na „kvalitu“ pozdější
rekonstrukce, bohužel se nám nepodařilo „vyřadit nepovedené“ body, které
vnášejí chybu.
Provedeme transformaci souřadnic námi (projektivně) rekonstruované scény na
souřadnice v reálné („skutečné“) scéně: Xi=H-1. mi.myXi
a zobrazíme ve 3D (v obrázku: oooo).
Analogicky s bodem 4, 5 pomocí nových projekčních matic myP, myP’
provedeme zpětnou projekci „skutečné“ scény do obrazu a zobrazíme (v obrázku: oooo).
Naše implementace
1. Postup našeho výpočtu je uložen v souboru uloha2.m.
Ukázka postupu
Vstupní obrazy
 |
 |
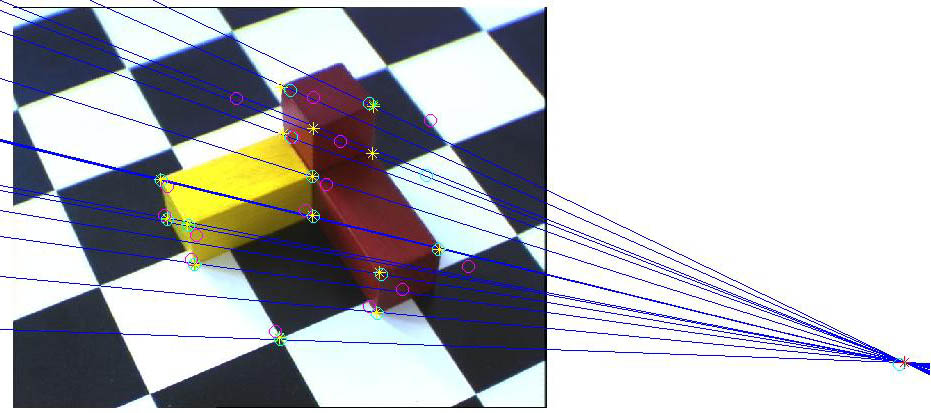
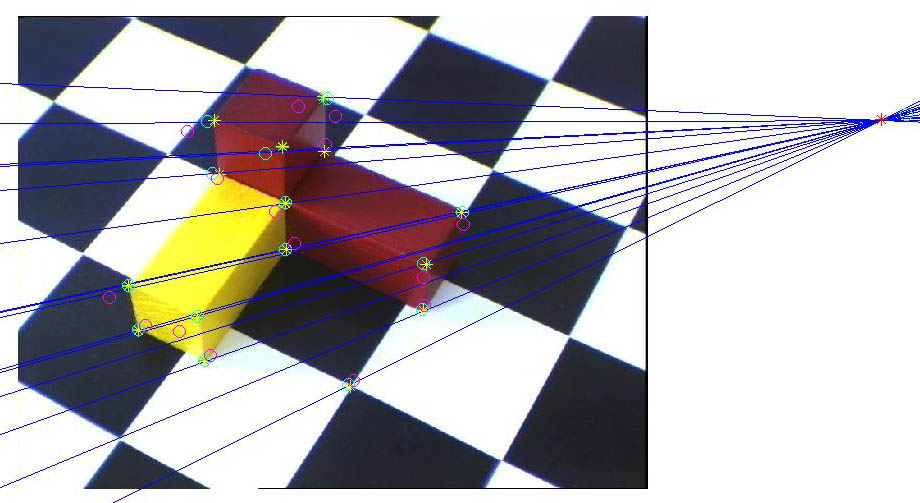
Vstupní obrazy s korelujícímy body, epipolárami, epipóly a všemi zpětnými projekcemi
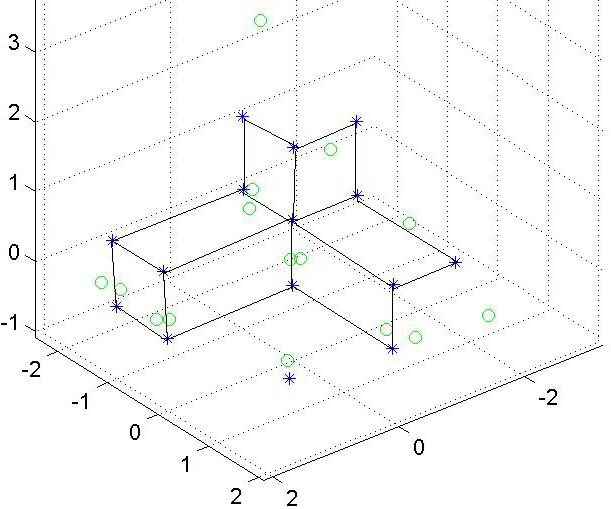
Skutečná a (projektivně) rekonstruovaná scéna
Závěr
Použitím skriptu v souboru uloha2.m lze předvést všechny
požadované funkce týkající se rekonstrukce scény.
Kvalita rekonstrukce bohužel není nejlepší, neboť celkový výsledek poškodí
několik „špatných“ bodů, které se nám nepodařilo (zcela) odstranit.