POČÍTAČOVÉ VIDĚNÍ - PVI
Úloha 2: Rekonstrukce scény ze dvou obrazů
Jiří Liška 5/25
Zadání
Naším úkolem byla rekonstrukce scény ze dvou obrazů ze zadaných bodů v obrazech a zadané korespondenci mezi nimi.
a) fundamentální matice
Nejprve je třeba vypočítat fundamentální matici F ze dvou pohledů. Tato matice definuje epipolární geometrii.
Platí:
![]() ,
,
kde ![]() a
a ![]() jsou
hohogenní souřadnice
bodů v prvním a druhém obraze (u = [ui,
vi, 1]), F je fundamentální matice.
jsou
hohogenní souřadnice
bodů v prvním a druhém obraze (u = [ui,
vi, 1]), F je fundamentální matice.
Z tohoto vztahu vyjádříme pro každý bod jednu rovnici. Jelikož matice F je typu 3x3 a rovnice je homogenní, je třeba minimálně osmi bodů, abychom obdrželi právě jedno řešení. Při použití více než osmi bodů musíme snížit hodnost sestavené rovnice na 8. To provedeme pomocí SVD:
[U,S,V] = svd(A);
S(9,9) = 0;
A2 = U*S*V';
f = null(A2);
F = reshape (f, 3, 3)’
![]() ,
, ![]() - reprezentuje přímku
(epipoláru) v prvním obraze
- reprezentuje přímku
(epipoláru) v prvním obraze
![]()
![]() ,
, ![]() - reprezentuje přímku
(epipoláru) v prvním obraze
- reprezentuje přímku
(epipoláru) v prvním obraze
Pomocí matice ![]() F můžeme body z prvního obrazu zobrazit
na přímku (epipoláru) do obrazu druhého a naopak. Pro body na
spojnici středů kamer nemá přímka reprezentanta (0, 0, 0).
F můžeme body z prvního obrazu zobrazit
na přímku (epipoláru) do obrazu druhého a naopak. Pro body na
spojnici středů kamer nemá přímka reprezentanta (0, 0, 0).
Rovnice epipólů (průsečíky epipolár) tedy získáme z rovnic :
![]()
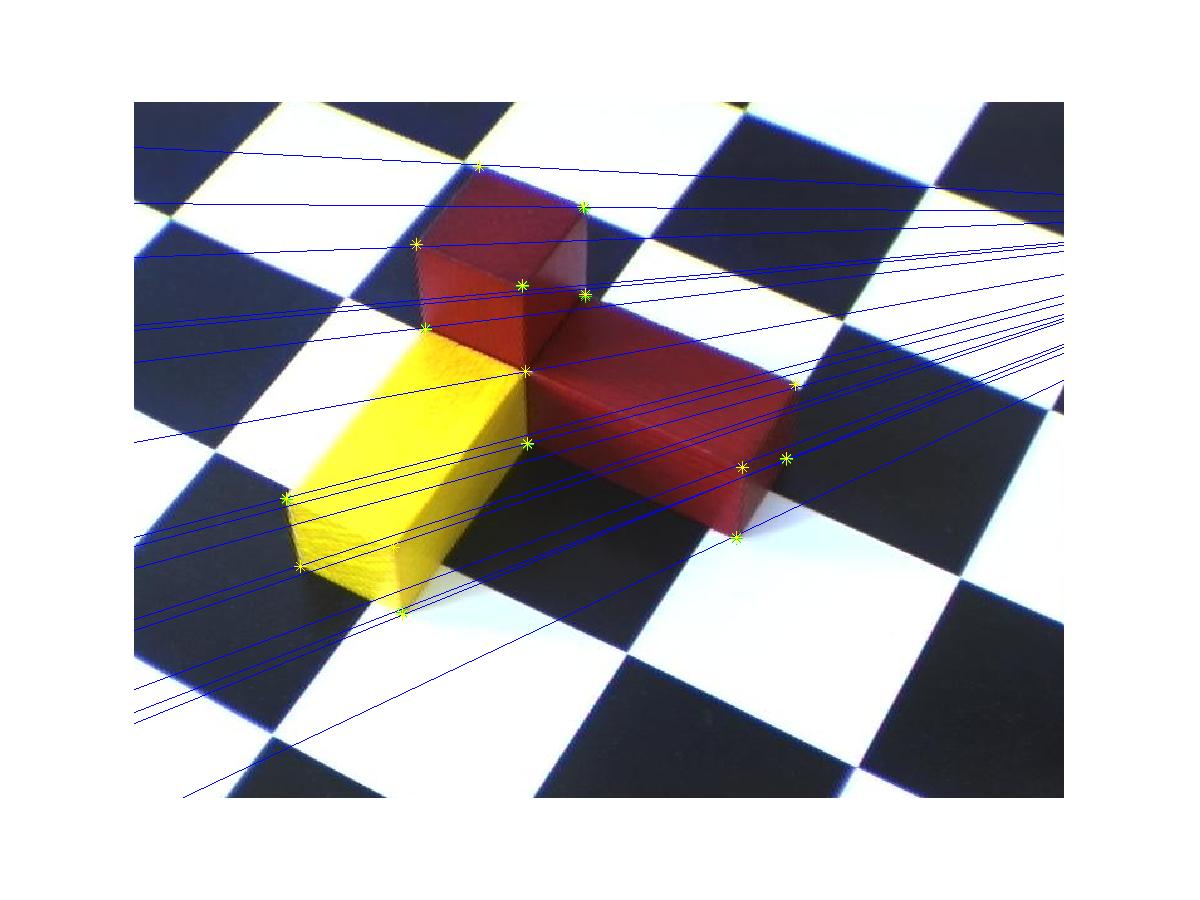
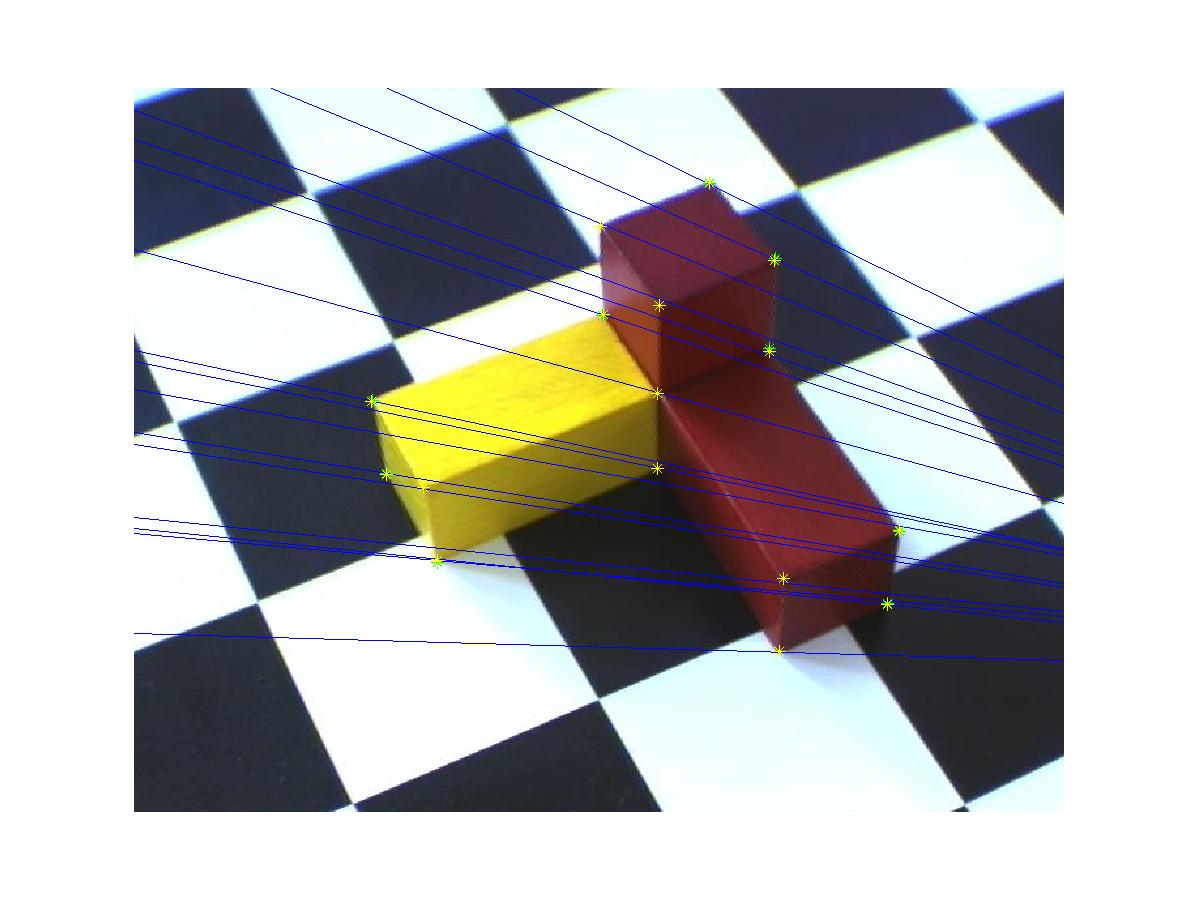
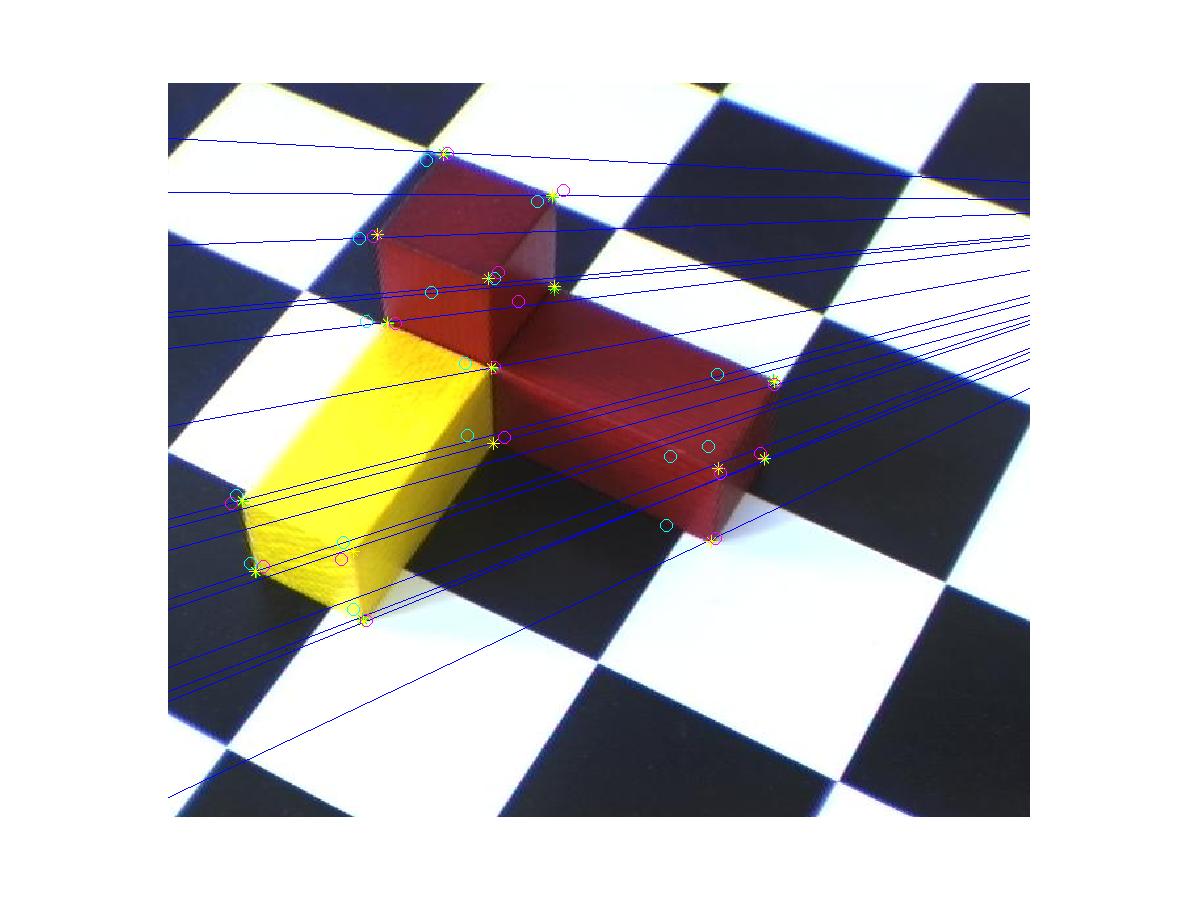
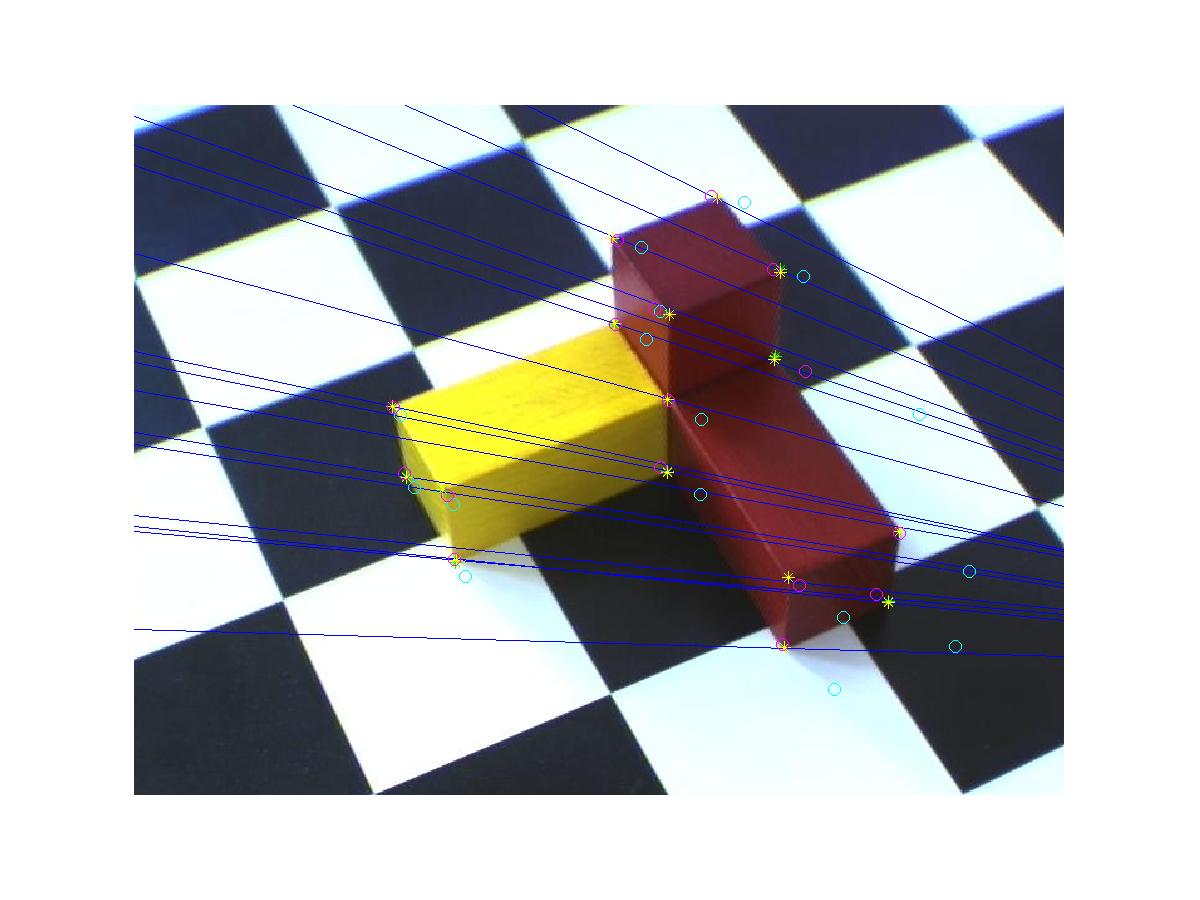
b) nakreslené epipoláry a epipóly
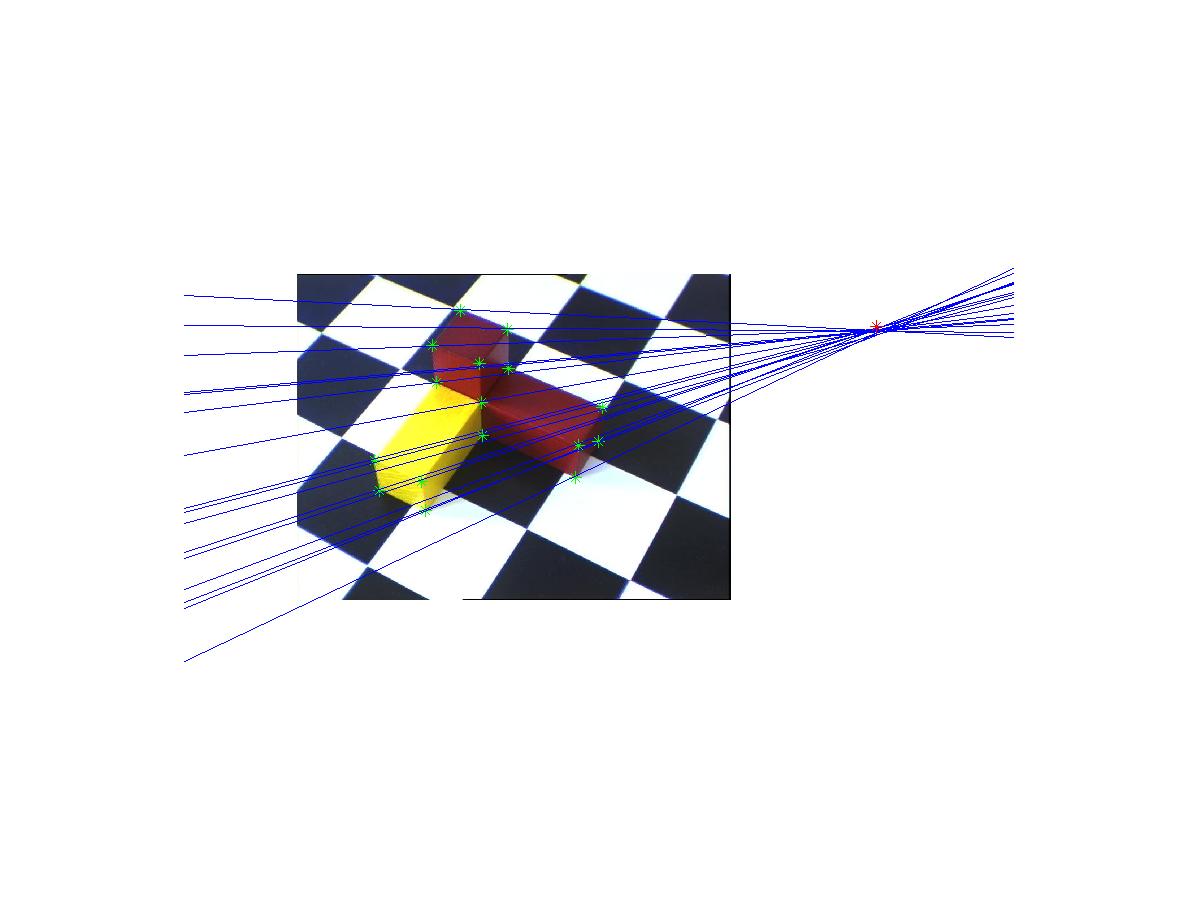
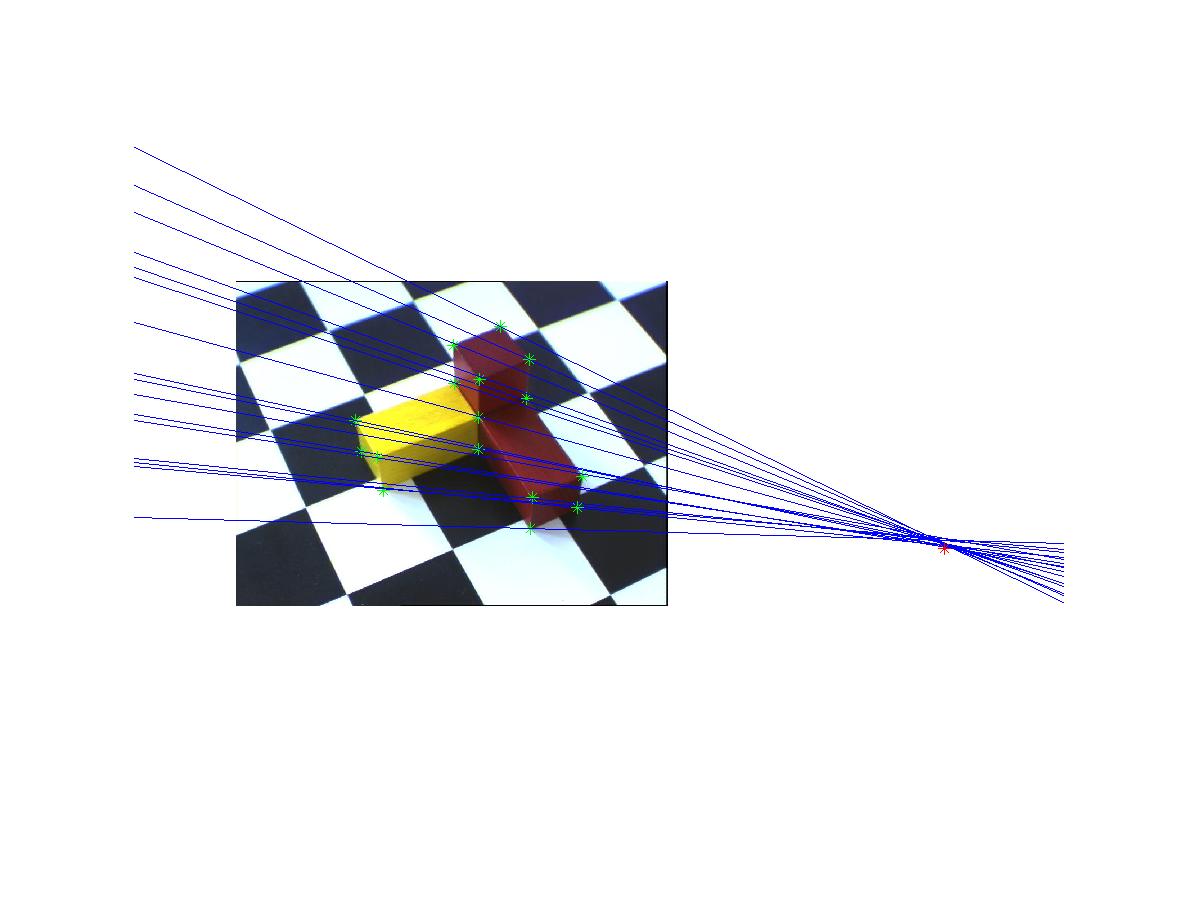
Nalezení epipólů vyšlo trochu nepřesně, což je nejspíš způsobeno tím, že body, které v programu corrgui nalezneme, musíme umístit velmi přesně a protože obrázky nebyly příliš kvalitní a hrany kvádrů byly zaoblené, nepodařilo se mi je umístit přesněji.
2) Rekonstrukce z kalibrovaných kamer
Výpočet souřadnic bodů skutečné scény provedeme z následujících rovnic :
![]() , kde
, kde
![]() ,
,
![]() jsou konstanty specifické pro
každý bod
jsou konstanty specifické pro
každý bod
![]() ,
,
![]() jsou homogenní souřadnice bodů
v obrazech
jsou homogenní souřadnice bodů
v obrazech
![]() ,
,
![]() jsou známé projekční matice
jsou známé projekční matice
![]() ,
,
![]() jsou souřadnice bodů
jsou souřadnice bodů

je-li X vlastní bod, pak ![]() :
:
![]()
Výpočet je ale numericky nepřesný, protože se přímky nebudou protínat, ale budou mimoběžky, tak chceme nalézt bod, který bude ve středu příčky mimoběžek.

Rekonstruovaný bod ![]() bude ležet ve středu příčky zadané body
bude ležet ve středu příčky zadané body ![]() a
a![]() .
.
a) reprojekce rekonstruovaných bodů:
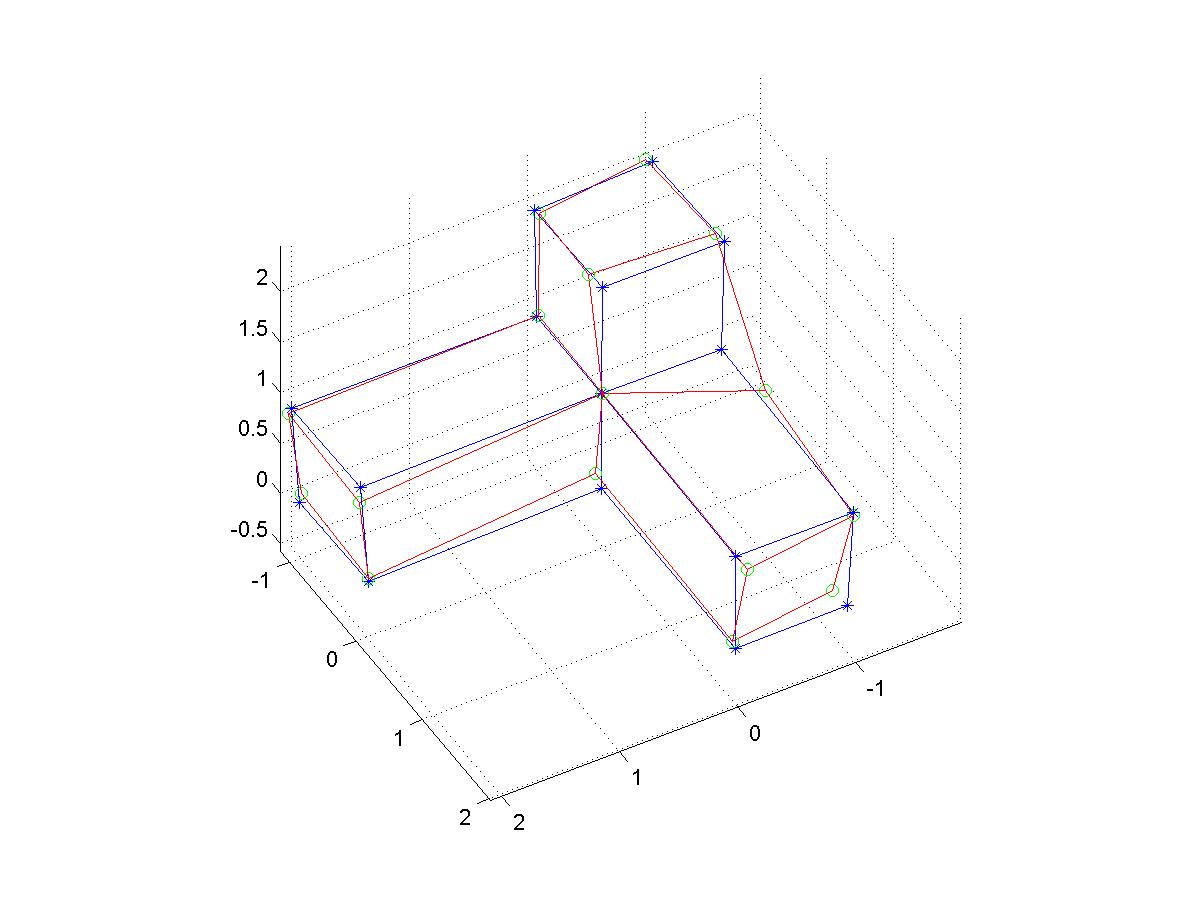
b) pohled na 3D body:
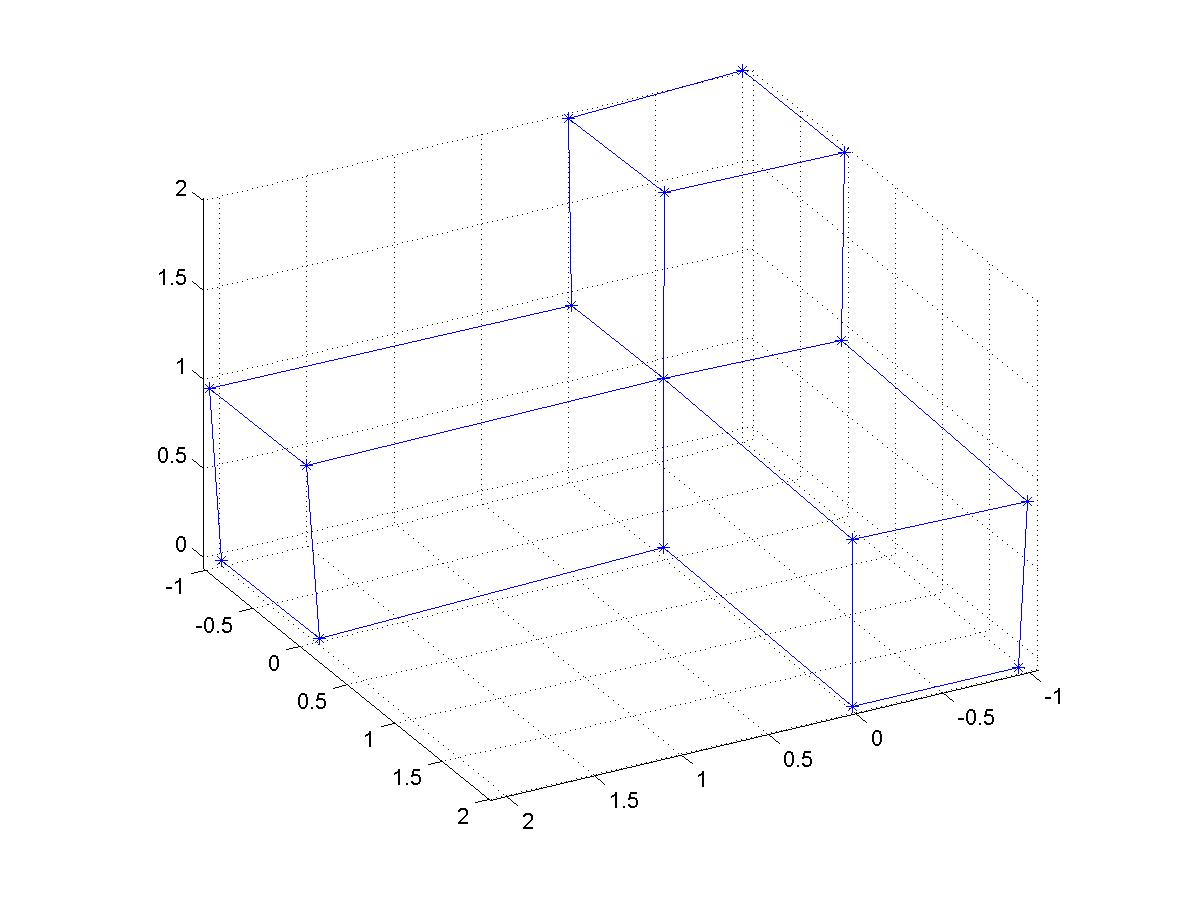
3) Projektivní rekonstrukce
Při výpočtu opět vycházíme ze známých rovnic, nyní však neznáme projektivní matice P.
Můžeme jednu matici zvolit a druhou dopočítat, protože známe vztah mezi projekčními maticemi.
Matici P můžeme rozložit na submatici A a sloupcový vektor b
![]()
Jelikož obrazem středu
první kamery v druhém obraze je epipól e
(![]() ) a
) a ![]() , je sloucový vektor b
roven
, je sloucový vektor b
roven ![]() . Dále lze ukázat, že součin
. Dále lze ukázat, že součin ![]() je
antisymetrická matice:
je
antisymetrická matice:

Z podmínky antisymetrie předchozí matice dostaneme soustavu rovnic pro výpočet matice A.
Jelikož hodnost matice předchozí soustavy rovnic je 5, obdržíme čtyřrozměrný systém řešení. Matici A pak dostaneme jako libovolnou lineární kombinaci bázových matic takovou, že hod(A) je 3.
Pro lepší numerické výsledky jsem vybíral z několika náhodných
lineárních kombinací a použil jsme kombinaci s největším
poměrem prvního a posledního prvku diagonály matice S při svd rozkladu matice A. Druhou projekční matici pak
složíme z matice A a druhého
epipólu ![]()
Z vypočtených projekčních matic můžeme jako v předchozím bodě pomocí příčky mimoběžek určit rekonstruované body.
Mezi skutečnými a rekonstruovanými body platí, že jsou stejné až na vynásobení maticí 4x4 (stejnou pro všechny body) a kostantou specifickou pro každý bod:
![]()
Z tohoto vztahu můžeme vypočítat matici H, potřebujeme ale minimálně 5 bodů.
- struktura Z pro 5 bodů
a) reprojekce
b) odhad matice H
c) 3D pohled na rekonstruované body transformací H