| Úloha druhá: | Rekonstrukce obrazu |
| Autoři: | Petr Přibyl, Jakub Heindrych, Radek Matouch |
| Obsah: | Zadání |
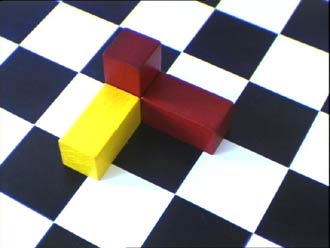
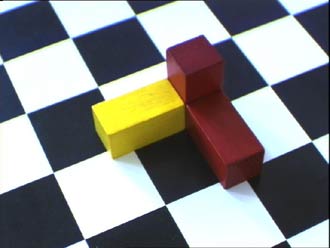
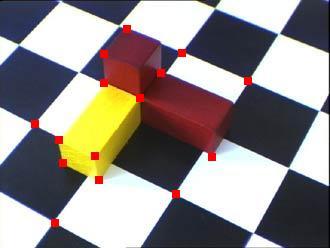
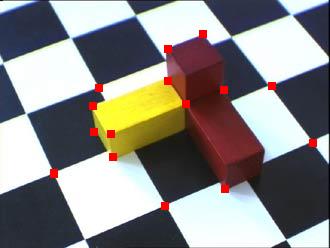
| Výběr bodů | |
| Určení fundamentální matice | |
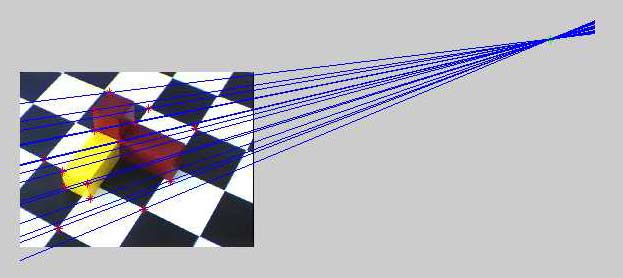
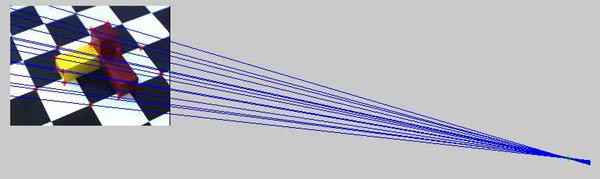
| Výpočet epipólů a epipolár | |
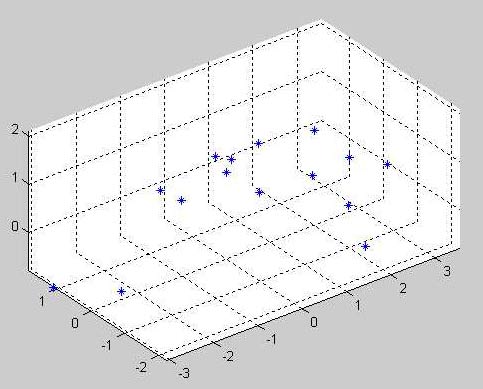
| Rekonstrukce bodů scény | |
| extract.m a kostky.m - soubory se zdrojovým kódem |
|
|
|
load kostky2.mat; CORR = CORR_EXCHANGE; points1 = CORR.d.corr(20:34,:,1); points2 = CORR.d.corr(20:34,:,2); q1 = points1; q2 = points2; Q1=[q1(:,1) q2(:,1)]; Q2=[q1(:,2) q2(:,2)]; |
 |
 |

|
% vektor vybranych bodu indexy = [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19]; % soustava pro nalezeni prvku fundamentalni matice matice = zeros(15,9); for i=1:15 matice(i,1) = Q1(indexy(i),1)* Q2(indexy(i),1); matice(i,2) = Q1(indexy(i),1)* Q2(indexy(i),2); matice(i,3) = Q1(indexy(i),1); matice(i,4) = Q1(indexy(i),2)* Q2(indexy(i),1); matice(i,5) = Q1(indexy(i),2)* Q2(indexy(i),2); matice(i,6) = Q1(indexy(i),2); matice(i,7) = Q2(indexy(i),1); matice(i,8) = Q2(indexy(i),2); matice(i,9) = 1; end [U, S, V] = svd(matice); % vytvorime fundamentalni matici F = reshape (V(:, 9), 3, 3)'; [U, S, V] = svd(F); S(3,3) = 0; F = U * S * V'; |
|
e1.F = 0
|
F.e2t = 0
|
|
e1 = U(:, 3) ./ U(3, 3); e2 = V(:, 3) ./ V(3, 3); |
|
l1= F . u'
|
l2= u'T . F
|
|
for i=1:15 ep1 = F * [Q2(i, 1) Q2(i, 2) 1]'; nula = [Q1(1, :) 1] * ep1; nula = 0; x1 = 0; x3 = 3000; y1 = (nula-ep1(3) - x1 * ep1(1)) / ep1(2); y3 = (nula-ep1(3) - x3 * ep1(1)) / ep1(2); line([x1 x3]', [y1 y3]'); end |
 |
 |
|
ai1.ui1= P1 . Xi
|
ai2.ui2= P2 . Xi
|
|
%nacteme projekcni matice obou kamer load pointcal_mat; % sestaveni matice pro nalezeni souradnic bodu v prostoru matice2 = zeros(4,4); body = zeros(15,3); for i=1:15 matice2(1, :) = [Q1(i,1) * P1(3, 1) - P1(1, 1) Q1(i,1) * P1(3, 2) - P1(1, 2) Q1(i,1) * P1(3, 3) - P1(1, 3) Q1(i,1) * P1(3, 4) - P1(1, 4)]'; matice2(2, :) = [Q1(i,2) * P1(3, 1) - P1(2, 1) Q1(i,2) * P1(3, 2) - P1(2, 2) Q1(i,2) * P1(3, 3) - P1(2, 3) Q1(i,2) * P1(3, 4) - P1(2, 4)]'; matice2(3, :) = [Q2(i,1) * P1(3, 1) - P2(1, 1) Q2(i,1) * P1(3, 2) - P2(1, 2) Q2(i,1) * P1(3, 3) - P2(1, 3) Q2(i,1) * P1(3, 4) - P2(1, 4)]'; matice2(4, :) = [Q2(i,2) * P1(3, 1) - P2(2, 1) Q2(i,2) * P1(3, 2) - P2(2, 2) Q2(i,2) * P1(3, 3) - P2(2, 3) Q2(i,2) * P1(3, 4) - P2(2, 4)]'; [U, S, V] = svd(matice2); body(i,:) = V(1:3, 4)' ./ V(4, 4); end |
|
figure(2); for i=1:15 plot3(body(i,1), body(i,2), body(i,3), '*'); hold on; grid on; axis equal; end |