

| Zadání |
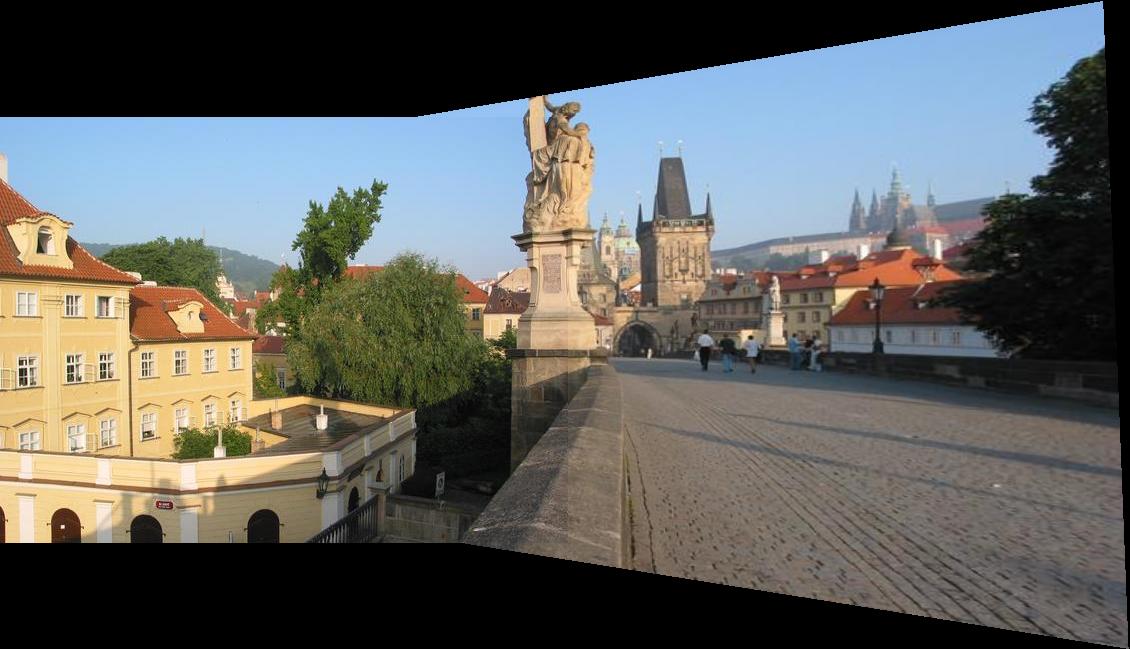
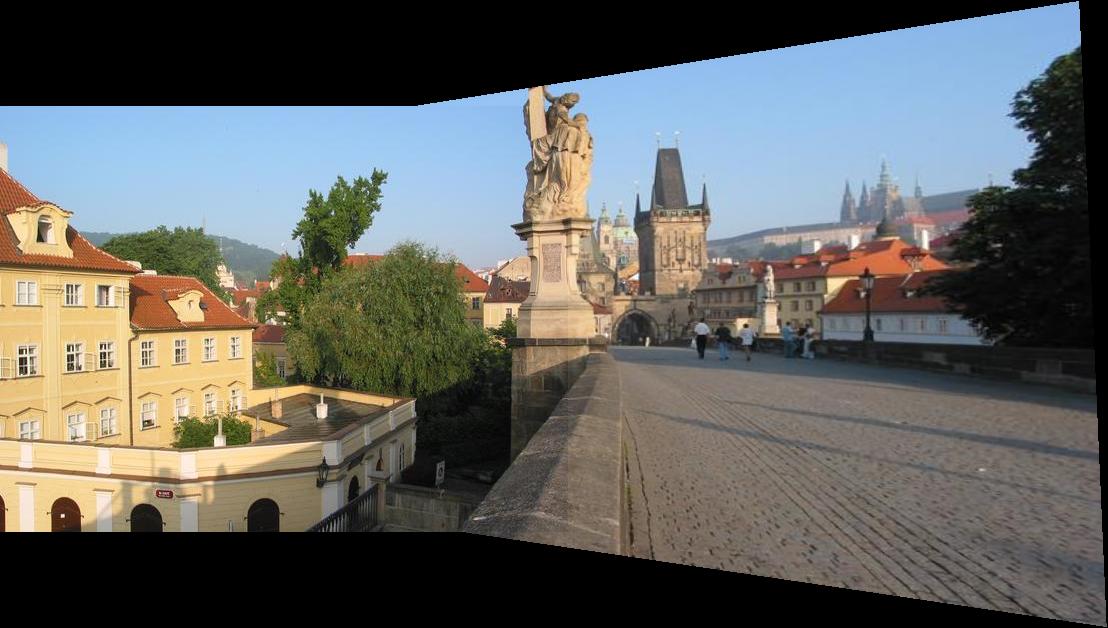
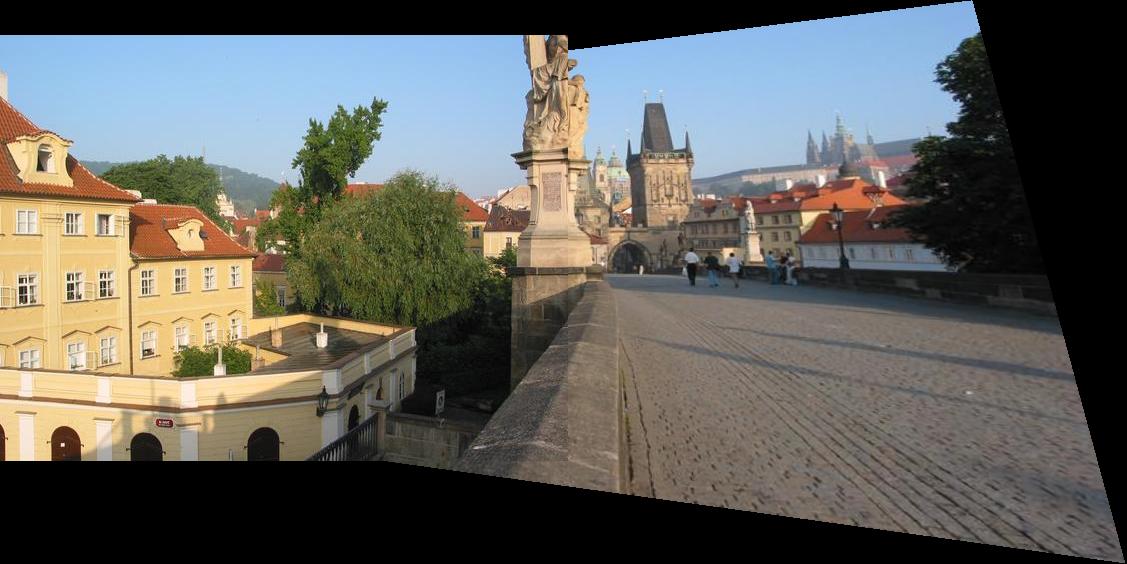
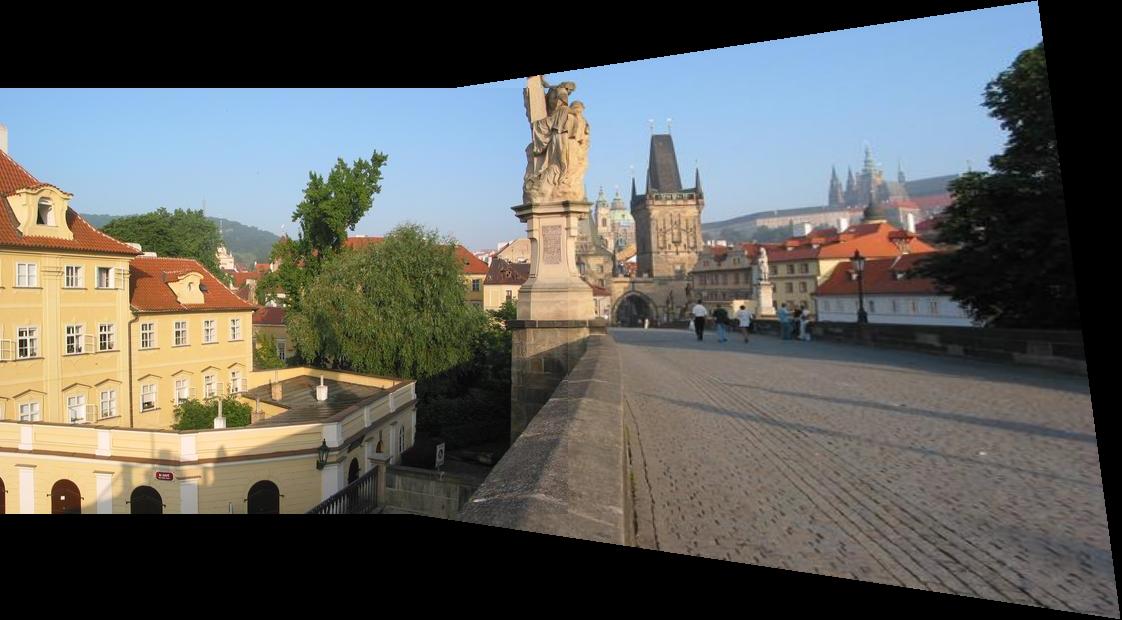
Složte dva překrývající se snímky pořízené perspektivní kamerou tak, aby vytvořily celkový panoramatický pohled.
|
|
|
| Obrázek 1: Vstupní snímky. | ||
| Model |
Panoramatický pohled na scénu vytvoříme tak, že dané snímky promítneme do společné obrazové roviny. Pro jednoduchost budeme dále předpokládat, že snímky byly pořízeny kamerou, která se otáčela kolem svislé osy procházející jejím optickým středem C, viz obrázek 2.
 |
| Obrázek 2: Schematické znázornění pořízení jednotlivých snímků. |
Pozorovaný bod X má v souřadné soustavě světa Ob zaměření Xb a optický střed kamery C má zaměření Cb. Na základě matematického modelu kamery podle [2, str. 6] potom můžeme pro oba snímky psát
| α1 ub1 = A1 ( Xb - Cb ) , | (1) | |
| α2 ub2 = A2 ( Xb - Cb ) . | (2) |
Zde αi je konstanta z R \ {0}, ubi = [ ubi vbi 1 ]T jsou homogenní souřadnice pozorovaného bodu X v obrazové rovině i-tého snímku v bázi bi , Ai z R3x3 je regulární matice přechodu od báze b k bázi bi a i = 1, 2 je pořadové číslo snímku.
Protože obě kamery mají společný optický střed Cb a pozorují stejný bod v prostoru Xb , dostaneme porovnáním rovnic (1) a (2) výraz
| α1 A1-1ub1 = α2 A2-1ub2 . | (3) |
Volbou matice H = A2 A1-1 a konstanty α = α2 / α1 , dostaneme úpravou (3) rovnici
| α ub2 = H ub1 . | (4) |
Vzniklá matice H (tzv. homografie) je regulární matice z R3x3, která popisuje korespondence všech bodů mezi dvěma obrazy.
Obrazovou rovinu výsledné panoramatické scény jsme zvolili totožnou s obrazovou rovinou prvního snímku. Hledaným vztahem je v tomto případě identita I, tj. obraz se pouze zkopíruje. Druhý snímek jsme do panoramatického obrazu transformovali pomocí homografie H. Celou situaci zachycuje obrázek 3. Zde Ob1 a Ob2 představují souřadné soustavy vstupních snímků.
 |
| Obrázek 3: Vytvoření mozaiky panoramatického pohledu. |
| Výpočet homografie |
Homografii H lze určit na základě znalosti souřadnic několika dvojic korespondujících bodů a přímek v obou obrazech.
Každou dvojici korespondujících bodů označme indexem j = 1, ... , n. Potom lze podle (4) pro každou takovou dvojici psát
| αj u'j = H uj , | (5) |
kde uj = [ uj vj 1 ]T a u'j = [ u'j v'j 1 ]T jsou homogenní souřadnice j-té korespondence, H je homografie a αj je neznámá konstanta z R \ {0}.
Nechť h1T, h2T a h3T jsou řádky matice H. Pro každou korespondenci s pořadovým číslem j tak ze vztahu (5) získáme soustavu rovnic
| αj u'j | = | h1T uj , | (6) |
| αj v'j | = | h2T uj , | (7) |
| αj | = | h3T uj . | (8) |
Dosazením vztahu (8) za αj do (6) a (7) získáme dvě lineární algebraické rovnice pro neznámé h1, h2 a h3, tedy
| h3T uj u'j = h1T uj , | ||
| h3T uj v'j = h2T uj . |
Pro všechny korespondence bodů ve dvou obrazech tak získáme systém 2n homogenních lineárních algebraických rovnic pro 9 neznámých, který lze přepsat do maticového tvaru
|
|
= 0, j = 1, ... , n, | ||||||||||||||||
a který symbolicky označíme
| A h = 0 . | (9) |
Protože používáme homogenní souřadnice, je homografie H v rovnici (5) určena až na skalární násobek αj jednoznačně. Matice A má díky tomu hodnost pouze osm. K určení homografie proto musíme v matici A získat osm lineárně nezávislých řádků. Protože každá dvojice korespondujících bodů označená indexem j dává dvě rovnice, stačí volit počet korespondencí n = 4. Tyto body nesmějí ani v jednom z obrazů ležet na přímkách.
Řešením soustavy (9) je nulový prostor matice A, který nalezneme pomocí jejího SVD rozkladu, viz [3, str. 113]. Aby byl výpočet robustní vůči chybám a šumu, je výhodné takových korespondencí použít n >> 4.
Matici homografie H lze určit i na základě znalosti souřadnic korespondujících přímek v jednotlivých obrazech. Dá se ukázat, že přímka se v našem případě mezi dvěma obrazy transformuje podle rovnice
| HT lb2 = γ lb1 . | (10) |
Zde γ je konstanta z R \ {0}, i = 1, 2 je pořadové číslo snímku, lbi = [ ubi vbi wbi ]T jsou souřadnice přímky v obrazové rovině i-tého snímku v bázi bi a H z R3x3 je homografie, která je stejná jako ve vztahu (4).
Mějme ve dvou obrazech n korespondujících přímek a jednotlivé korespondence označme indexy j = 1, ... , n. Pro každou korespondenci pak můžeme podle (10) psát
| γj lj = HT l'j , | (11) |
kde lj = [ uj vj wj ]T a l'j = [ u'j v'j w'j ]T jsou souřadnice přímek v příslušných bázích, H je homografie a γj je neznámá konstanta z R \ {0}.
Když sloupce matice H označíme q1, q2 a q3, pak rozepsáním (11) získáme pro každou korespondenci soustavu rovnic
| γj uj | = | q1T l'j , |
| γj vj | = | q2T l'j , |
| γj wj | = | q3T l'j . |
Abychom vyeliminovali neznámou konstantu γj , podělíme vzájemně každé dvě rovnice a dostaneme
| ( γj uj ) / ( γj wj ) | = | ( q1T l'j ) / ( q3T l'j ) , |
| ( γj vj ) / ( γj wj ) | = | ( q2T l'j ) / ( q3T l'j ) , |
| ( γj uj ) / ( γj vj ) | = | ( q1T l'j ) / ( q2T l'j ) . |
Odtud úpravou získáme ekvivalentní soustavu tří homogenních lineárních algrebraických rovnic pro neznámé q1, q2 a q3, tedy
| -wj q1T l'j + uj q3T l'j = 0 , |
| -wj q2T l'j + vj q3T l'j = 0 , |
| -vj q1T l'j + uj q2T l'j = 0 . |
Pro všechny korespondence přímek dále sestavíme systém 3n homogenních lineárních algebraických rovnic pro 9 neznámých, který přepíšeme do maticového tvaru
|
|
= 0, j = 1, ... , n, | ||||||||||||||||
| : |
a který pro jednoduchost zapíšeme
| B q = 0 . | (12) |
Homografie H v rovnici (11) je určena, podobně jako tomu bylo ve vztahu (5), až na skalární násobek γj jednoznačně. Matice B má díky tomu hodnost pouze osm. Kγurčení homografie H z přímek proto potřebujeme v matici B získat osm lineárně nezávislých řádků. Protože každá dvojice korespondujících přímek označená indexem j dává dva lineárně nezávislé řádky matice B, stačí volit počet korespondencí n = 4. Tyto přímky musí v obou obrazech ležet v obecné poloze.
Řešením soustavy (12) je nulový prostor matice B, který nalezneme pomocí jejího SVD rozkladu, viz [3, str. 113]. Aby byl výpočet robustní vůči chybám a šumu, je výhodné takových korespondencí použít n >> 4.
Homografii H lze určit i z krespondencí bodů a přímek zároveň. Podobně, jako tomu bylo v rovnicích (9) a (12), lze i pro tento případ sestavit soustavu homogenních lineárních algebraických rovnic a oba předchozí postupy tak sloučit. Tímto problémem jsme se však dále nezabývali.
| Normalizace dat |
Abychom při výpočtu homografie H minimalizovali numerické chyby, musí být matice A, resp. B dobře podmíněna, viz [3, str. 111]. Je proto výhodné každý ze souborů vstupních souřadnic uj a u'j, resp. lj a l'j jednotlivých korespondencí normovat tak, aby výsledné soubory uj a u'j , resp. lj a l'j , ze kterých budeme matici A, resp. B, sestavovat, měly střední hodnotu mean(X) = μX = [ 0 0 1 ]T a rozptyl var(X) = σX2 = [ 1 1 0 ]T, viz [4, str. 466].
Normované souřadnice Xj = [ xj yj 1 ]T pro sestavení matice A, resp. B jsme pro všechny korespondence j = 1, ... , n vypočetli podle
| Xj = NX Xj , | (13) |
kde Xj = [ xj yj 1 ]T jsou původní souřadnice a matice NX byla určena jako
| NX = |
|
. | |||||||||||
Zde μx a μy jsou střední hodnoty a σx a σy jsou rozptyly ve složkách x a y původních souřadnic.
Vztah korespondence všech bodů v obou obrazech podle (5) potom přejde do tvaru
| αj u'j = H uj = Nu'-1 Hu'u Nu uj , | (14) |
kde Nu a Nu' jsou normalizační matice, Hu'u je vypočtena z normovaných dat řešením soustavy rovnic (9) a homografie H = Nu'-1 Hu'u Nu .
Podobně i vztah korespondence všech přímek podle (11) přejde do tvaru
| γj lj = HT l'j = Nl-1 Hll'T Nl' l'j . | (15) |
Zde Nl a Nl' jsou normalizační matice, Hll' je vypočtena z normovaných dat řešením soustavy rovnic (12) a homografie HT = Nl-1 Hll'T Nl' .
| Výsledky |
Korespondující body v obou snímcích jsme určili v prostředí MATLAB 5.3 pomocí programu CORRGUI. Body byly voleny tak, aby pokrývaly co nejvetší plochu překrývajících se částí obou obrazů. Pro výpočet homografie jsme použili osm bodů, viz obrázek č. 4.
 |
 |
|
| Obrázek 4: Vyznačení korespondujících bodů v jednotlivých obrazech. | ||
Souřadnice přímek v obrazech jsme získali z automaticky vygenerovaných souborů, které byly součástí zadání. Pro výpočet homografie H jsme jich vybrali osmnáct tak, aby byly rozmístěny na co největší ploše v překrývajících se částech obou obrazů, viz obrázek č. 5. Při volbě menšího počtu korespondencí jsme již nedostávali dobré výsledky.
 |
 |
|
| Obrázek 5: Vyznačení korespondujících přímek v jednotlivých obrazech. | ||
Výpočtem podle (9) jsme bez normalizace souřadnic bodů získali homografii
| H = |
|
, | |||||||||||
kde podmíněnost matice A byla χ(A) = 46667323,6. Normalizací dat podle (13) byla podmíněnost χ(A) = 268,6 a homografie
| H = |
|
. | |||||||||||
Bez normalizace souřadnic přímek jsme výpočtem podle (12) získali homografii
| H = |
|
, | |||||||||||
kde podmíněnost matice B byla χ(B) = 34547129. Normalizací podle (13) jsme dostali homografii
| H = |
|
. | |||||||||||
Podmíněnost matice B byla v tomto případě χ(B) = 318,5.
Složené mozaiky panoramatu Karlova mostu můžeme vidět na obrázcích č. 6 až 9 vlevo. Pro aproximaci hodnot jasové funkce byla použita bilineární interpolace, viz [5, str. 140]. Na obrázcích vpravo jsou pak znázorněny rozdílové snímky překrývajících se částí obou obrazů. Čím tmavší odstín je použit, tím větší je rozdíl mezi skládanými snímky (bílá barva odpovídá nulovému rozdílu).
 |
 |
|
| Obrázek 6: Panorama Karlova mostu; homografie byla určena z původních souřadnic korespondujících bodů. | ||
 |
 |
|
| Obrázek 7: Panorama Karlova mostu; homografie byla určena z normovaných souřadnic korespondujících bodů. | ||
 |
 |
|
| Obrázek 8: Panorama Karlova mostu; homografie byla určena z původních souřadnic korespondujících přímek. | ||
 |
 |
|
| Obrázek 9: Panorama Karlova mostu; homografie byla určena z normovaných souřadnic korespondujících přímek. | ||
| Závěr |
Cílem úlohy bylo vytvořit panoramatatický obraz složený ze 2 snímků. Ty byly pořízeny kamerou, která se otáčela kolem svého optického středu.
Algoritmus jsme implementovali v prostředí MATLAB 5.3. Pro sestavení panoramatu jsme využili homografie, která byla v jednom případě určena z osmi korespondujících bodů a ve druhém z osmnácti korespondujících přímek v jednotlivých obrazech. Pro výpočet byly použity původní i normované souřadnice. K aproximaci hodnot jasové funkce při transformaci obrazu byla použita bilineární interpolace.
Dosažené výsledky jsme porovnali na základě rozdílových snímků překrývajících se oblastí obrazů. Nejlepší výsledky byly dosaženy pomocí homografie vypočtené z normovaných souřadnic korespondujících bodů. Nejhorší výsledky pak dávala homografie vypočtená z původních souřadnic přímek.
[1] T. Pajdla: Přednášky z PVI 2003; http://cmp.felk.cvut.cz/cmp/courses/pvi2003/LectureNotesPVI2003/, přístupné 8.6.2003.
[2] J. Šochman, T. Pajdla: Matematický model kamery v afinním prostoru. Výzkumná zpráva TR-2002-11. CMP FEL ČVUT, Praha, 2002, 7 pp.
[3] E. Krajník: Maticový počet. Skripta, vydavatelství ČVUT, Praha, 2000.
[4] M. Šonka, V. Hlaváč, R. Boyle: Image processing, analysis and machine vision. 2nd ed., PWS, Boston, 1998.
[5] V. Hlaváč, M. Sedláček: Zpracování signálů a obrazů. Skripta, vydavatelství ČVUT, Praha, 2000.