Corridor
Projective Reconstruction Based on Cake Configuration with Panoramic Reference View
Martin Urban, Tomas Pajdla, Tomas Werner, Vaclav Hlavac
Center for Machine Perception
Czech Technical University,
Prague
urbanm@cmp.felk.cvut.cz,
In this experiment, an image from a panoramic
catadioptric camera was used as reference
view. The other seven views were taken using a standard digital
photo-camera. The resolution of the catadioptric camera was 1000x1000 pixels
and of the photo-camera 1200x1600 pixels.
Reconstruction was done in the following steps:
-
Corresponding points were marked by a mouse.
-
Polygons were marked, each in one image.
-
Projective reconstruction via trifocal tensors in "unclosed" CAKE configurations
was done (See
Tech. report Urban-TR7-99.ps.gz)
-
Proj. rec. was upgraded to a Euclidean reconstruction by selecting 3D Euclidean
coordinates of 5 points.
-
VRML1 model extracted. Texture warped from the marked polygons. Warping
is done by affine transformation (supported by VRML) instead of projective
one, which is not entirely correct.
RecX: Reconstruction Toolbox for Matlab used,
Another example
Images from the input sequence:
Two views on the reconstructed model:
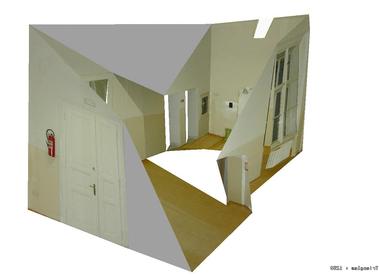
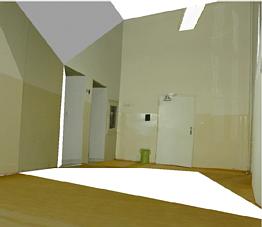
VRML model[0.4MB]
References:
-
Urban, Martin; Pajdla, Tomas; Hlavac, Vaclav. Projective Reconstruction
from Multiple Views. [Urban-TR7-99.ps.gz,
PostScript]
-
Urban, Martin; Pajdla, Tomas; Hlavac, Vaclav. Projective reconstruction
from N views having one view in common. Vision Algorithms workshop
(associated with ICCV'99). [.pdf.gz,
3.5 MB]
-
Werner, Tomas; Pajdla, Tomas; Urban, Martin. REC3D: Toolbox for 3D Reconstruction
from Uncalibrated 2D Views. [tr99-4.ps.gz,
PostScript]
The experiment was done using CORRGUI software system developed in CMP
by T. Pajdla, T. Werner, J. Burianek, J. Cernik.
Martin Urban
Last modified: Wed Oct 25 18:38:41 CEST 2000







