Stratified Dense Matching for Stereoscopic Vision
Jana
Kostlivá (Kostková)
Center for Machine Perception
Czech Technical University, Prague
http://cmp.felk.cvut.cz
Stereoscopic vision traditionally
belongs to highly investigated
topics in computer vision. The core of this filed is to establish
correspondences between the input images. In our research we use stereo
for 3D structure reconstruction. This application requires no false
positive and mismatch errors. Consequently, the goal is to
correctly
match binocularly visible areas, detect half-occlusions, and identify
unreliable regions (typically of low texture which are to be left
unmatched). The Confidently
Stable Matching algorithm is capable to solve this task. However,
the quality of results is paid by lower matching density.
The matching density is directly related to the discriminability
of matching features (e.g. contents of matching windows): the better
the
matching feature discriminability is the denser resulting disparity
maps
are. To improve the discriminability, the matching windows have
to
cover the same parts of the scene structures. However, such features
cannot be defined in the input images and their obtaining requires good
quality matching hypothesis which have to be found in advance.
Therefore, we propose a stratified dense
matching approach.
We pose the problem in disparity space (which is a set of
all
tentative matches). The windows are defined to adapt to high-similarity
structures in disparity space: disparity components (which
represent matching hypothesis). The disparity within one disparity
component (and thus also within the window) is allowed to vary in order
to cope with non-planar surfaces and slanted objects. To this
definition, two non-rectangular windows in the input images would
typically correspond. The window definition in disparity space
guarantees matching feature independence on projective distortions and
invariance to input image views.
Stratified Dense matching Algorithm:
- Pre-matching: selects pre-matches (the high-similarity
pairs)
- Disparity component tracing: traces out connected
disparity components on pre-matches resulting from the first step. For
each pre-match the corresponding disparity component, which directly
determine the matching window, is identified uniquely.
- Similarity re-computation: computes a new similarity
value
for each pre-match based on the matching windows resulting from the
second step.
- Final matching: finds the final matching using the new
similarity values. For this step, the Confidently
Stable Matching algorithm is used.
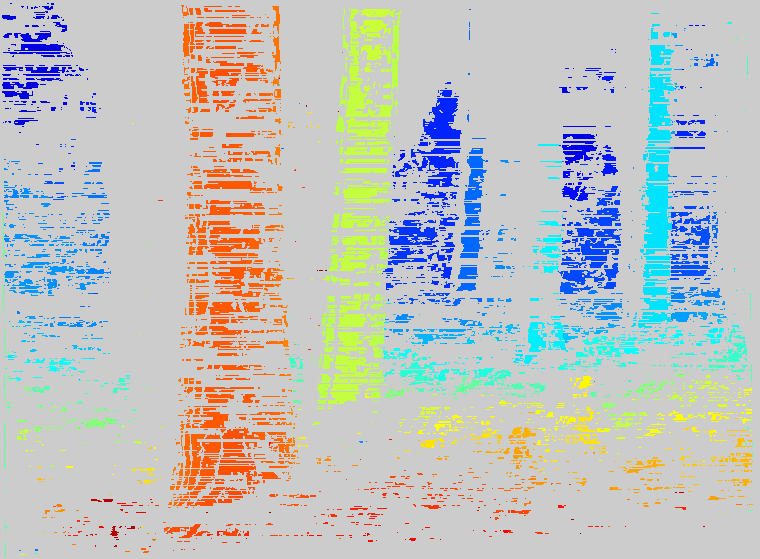
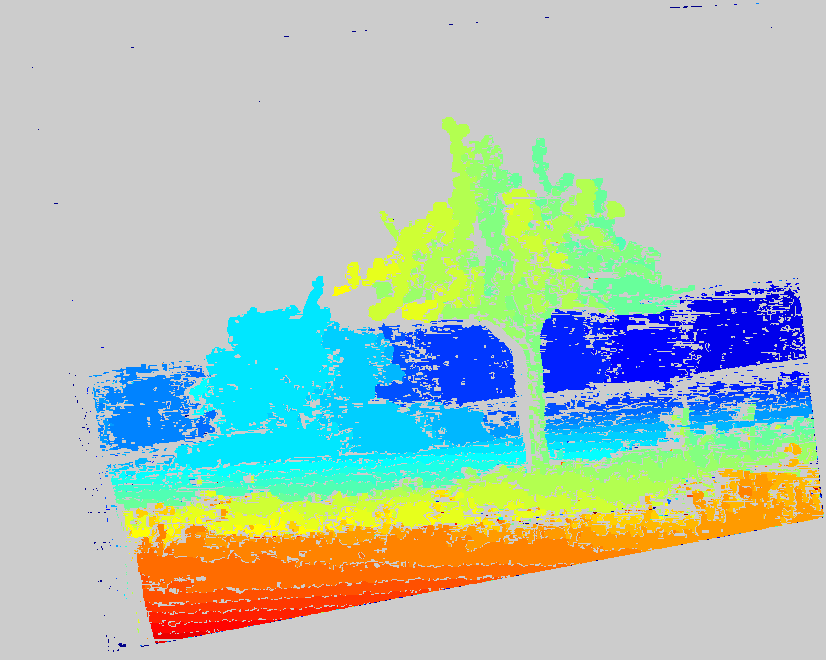
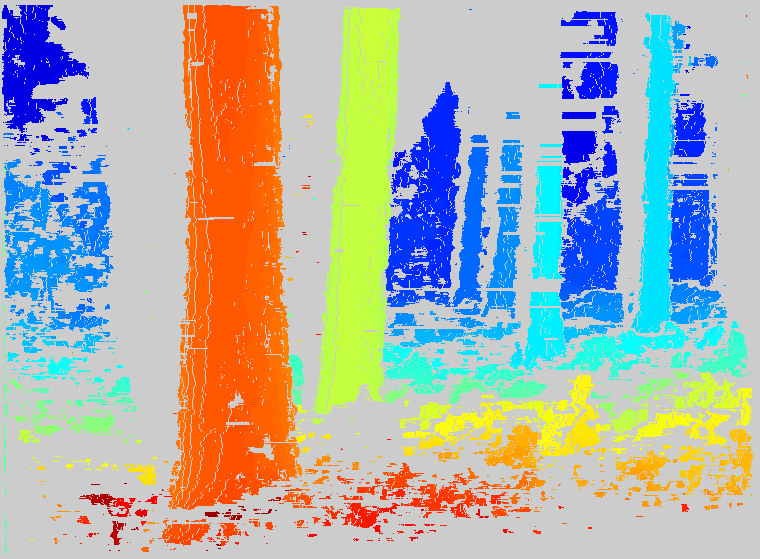
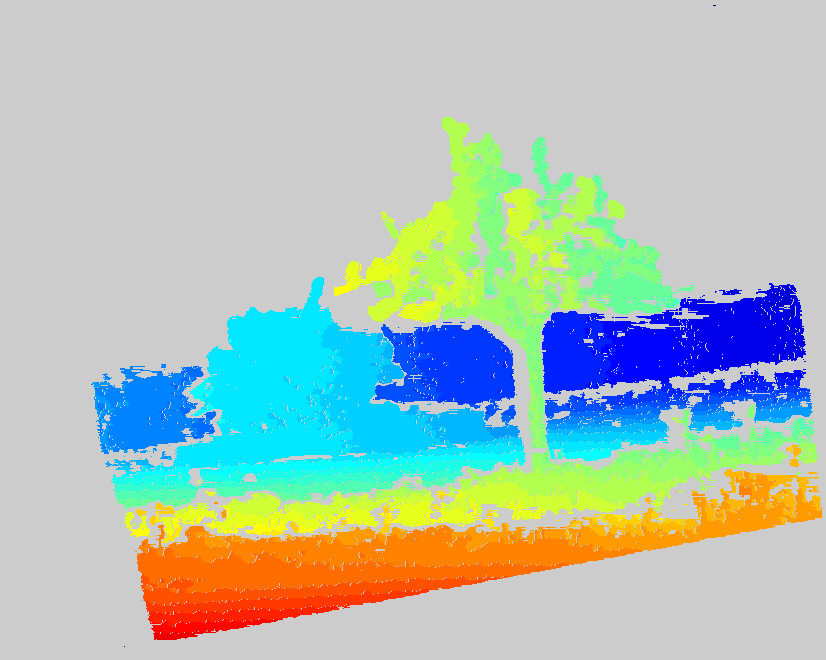
The Stratified Dense Matching approach improves matching feature
discriminability, such that the density of results (false negative
rate)
is improved about 3x and the accuracy of results (mismatch rate) about
2.3x, comparing to the plain Confidently Stable Matching algorithm
using
fixed-size rectangular windows defined in the input images. The results
on two very complex terrain scenes (the Larch Grove dataset and the
Apple Tree dataset) are shown below. The results on standard datasets
are shown here.
Confidently Stable Matching
Stratified Dense Matching
References:
- Stratified Dense Matching for Stereopsis in Complex Scenes.
Jana Kostková and Radim Šára. In Proc. of the British
Machine Vision Conference (BMVC2003),
pp. 339-348, 2003. [Kostkova-BMVC2003]
- Fast Disparity Component Tracing Algorithm for
Stratified Dense Matching Approach. Jana
Kostková and Radim Šára. Research Report CTU-CMP-2005-28,
Center for Machine Perception, Czech Technical University,
December 2005. [Kostkova-TR-2005-28.pdf]
- Stratified Dense Matching: Experimental Evaluation. Jana
Kostková and Radim Šára. Research Report CTU-CMP-2003-16,
Center for Machine Perception, Czech Technical University,
September 2003. [Kostkova-TR-2003-16.pdf]
- Disparity Component Matching Revisited. Jana
Kostková and Radim Šára. Research Report CTU-CMP-2002-08,
Center for Machine Perception, Czech Technical University, March
2002. [Kostkova-TR-2002-08.pdf]