Task:
- To estimate paramters of a nonlinear omnidirectional camera model from automatically
established image correspondences.
- No assumptions about the scene, besides rigidity (e.g. no calibration object).
- The class of omnidirectional cameras
possessing central projection, e.g. Nikon FC-E8 fishe-eye lens.
Middle: Original image acquired by a Nikon
FC-E8 fish-eye converter mounted on a Coolpix digital camera with
resolution 1600x1200 pixels.Yellow (smaller) and green (larger)
dashed rectangles depict standard perspective cameras with the field of view
90 deg and 120 deg respectively. The red circle depicts the field of view
183 deg.
Left: The size of undistorted images goes to
infinity for the field of view approaching 180 deg. Not all lines become
straight since the model does not sufficiently capture lens nonlinearity.
Right: The complete field of view can be represented on a
sphere, if correct parameters of the lens nonlinear model were estimated.
Left: Nikon FC--E8 fish-eye converter.
Right: The diagram of the construction of mapping

from the sensor plane

to the spherical retina

.
Concepts and Method:
- Omnidirectional division camera model
where a,b are parameters of the model, r is radius of an image point,
 is the angle between a ray and optical axis.
is the angle between a ray and optical axis.
- 3D directional vectors corresponding to camera rays
where
 are coordinates of an image point in the image plane.
are coordinates of an image point in the image plane.
- Exploiting epipolar constraint between two images
- Using Quadratic Eigenvalue Problem (QEP) to obtain simultaneous estimate of
paramters of a nonlinear camera model and an essential matrix
- Finally
- the calibrated camera, i.e. the parameters of a nonlinear omnidirectional camera model,
- the essential matrix,
- correct point correspondences (inliers)
are obtained.
Experiments:
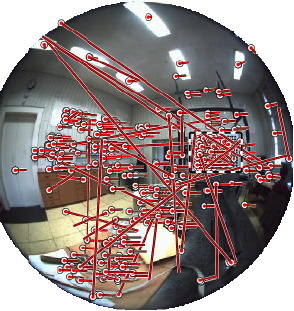
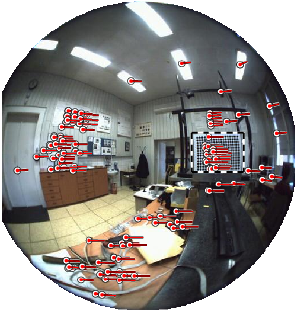
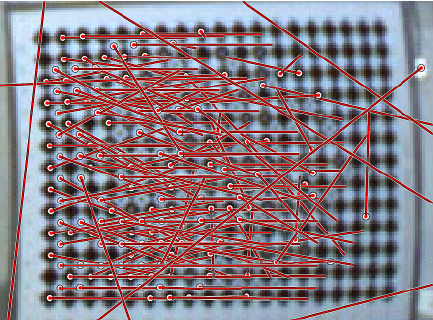
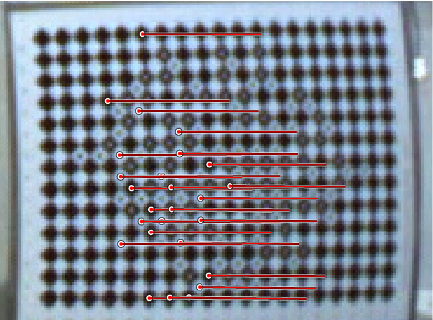
Outliers detection based on RANSAC
Using the method for outliers detection in omnidirectional images.
Left: Tentative correspondeces between a pair of the
omnidirectional images found by
WBS technique.
Circles mark
points in the first image, lines join them to their matches in the next
one.
Right: Detected inliers. A detail views of an object
with repetitive texture are shown.
Trajectory estimation
The Nikon FC--E8 fish-eye converter mounted on the Pulnix
TM1001 digital camera with resolution 1017x1008 pixels was rotated along a
circle.
Left: Experiment setup.
Right: Estimated circular trajectory.
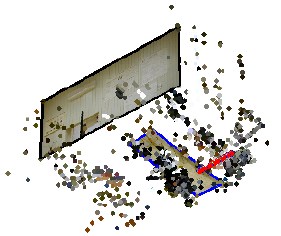
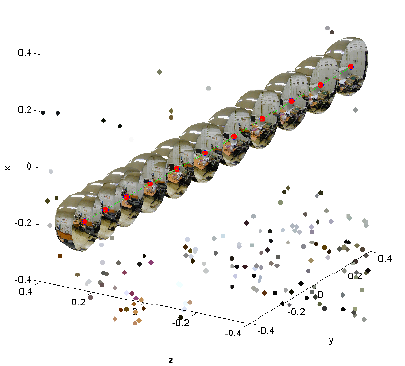
3D metric reconstruction from uncalibrated images
The first, the middle and the last image from the CMP lab sequence with detected inliers is depicted.
3D metric
reconstruction of a room from many uncalibrated omnidirectional
images. In collaboration with
Daniel
Martinec.
Left: The first omnidirectional image from a
sequence acquired by Nikon FC--E8 fish-eye converter mounted on the Coolpix
digital camera with resolution 1600x1200 pxl.
Middle: Two
reconstructed rectangles are depicted in images as well as in the 3D
reconstruction. Note, that the right angles were correctly
reconstructed.
Right: The reconstructed cameras lie on a
line.
References
-
Micusik B. and Pajdla T.: Estimation of Omnidirectional Camera Model from
Epipolar Geometry, Conference on Computer Vision and Pattern Recognition
(CVPR), Madison, USA, 2003
-
Micusik B. and Pajdla T.: Omnidirectional Camera Model and Epipolar
Geometry Estimation by RANSAC with Bucketing, Scandinavian Conference on
Image Analysis (SCIA), Goteborg, Sweden, 2003