R6P - Rolling Shutter Absolute Camera Pose
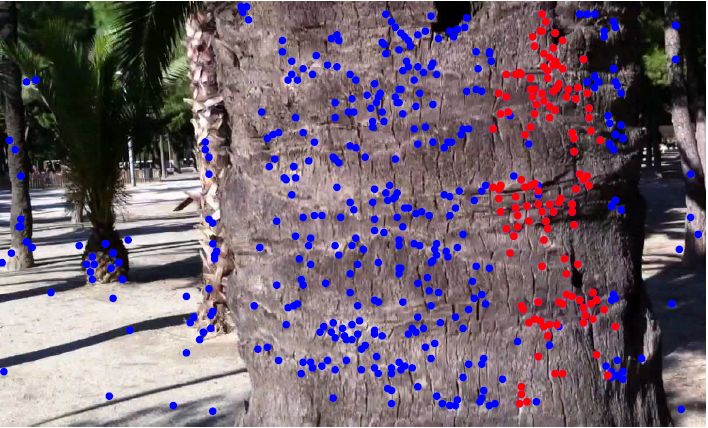
Inliers detected by P3P

Inliers detected by R6P

We present a solver that computes absolute camera pose for images captured with a rolling shutter camera. Vast majority of todays cameras (smartphones, digital compacts, DSLRs) have CMOS sensors with rolling shutter (RS). When RS camera is moving during the image capture the image becomes distorted. Compared to standard absolute pose algorithms we model also the camera motion, which leads to more precise camera pose estimation and more inliers in RANSAC.
Authors: Cenek Albl, Zuzana Kukelova, Tomas PajdlaAbstract: We present a minimal, non-iterative solution to the absolute pose problem for images from rolling shutter cameras. Absolute pose problem is a key problem in computer vision and rolling shutter is present in a vast majority of today's digital cameras. We propose several rolling shutter camera models and verify their feasibility for a polynomial solver. A solution based on linearized camera model is chosen and verified in several experiments. We use a linear approximation to the camera orientation, which is meaningful only around the identity rotation. We show that the standard P3P algorithm is able to estimate camera orientation within 6 degrees for camera rotation velocity as high as 30deg/frame. Therefore we can use the standard P3P algorithm to estimate camera orientation and to bring the camera rotation matrix close to the identity. Using this solution, camera position, orientation, translational velocity and angular velocity can be computed using six 2D-to-3D correspondences, with orientation error under half a degree and relative position error under 2%. A significant improvement in terms of the number of inliers in RANSAC is demonstrated.
Publication:
Cenek Albl, Zuzana Kukelova, Tomas Pajdla. R6P - Rolling Shutter Absolute Camera Pose Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2015.
Citation:
@InProceedings{Albl_2015_CVPR,
author = {Albl, Cenek and Kukelova, Zuzana and Pajdla, Tomas},
title = {R6P - Rolling Shutter Absolute Camera Pose},
journal = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2015}
}
Code:
R6P solver v1.0
Funding:
FP7-SPACE-2012-312377 PRoViDE project and Grant Agency of the CTU Prague project SGS13/202/OHK3/3T/13.