Contents
clear all;
data.xRect = [ 290 290 230 230]; data.yRect = [ 170 200 200 170];
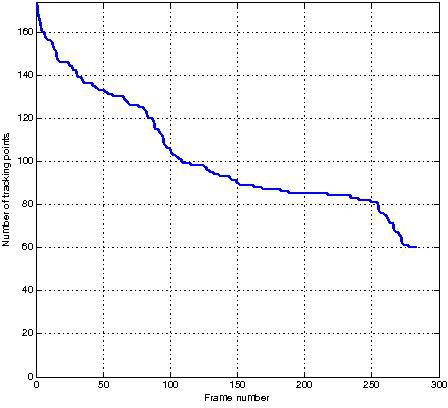
vyvoj poctu bodu
if (exist('homography.mat','file'))
load ('homography.mat');
if (isnumeric(xHistory.ID))
IDs = unique(xHistory.ID); nums = zeros(size(xHistory.ID));
for a = IDs'; nums(a) = sum(xHistory.ID == a); end;
nums = nums(nums~=0); counts = zeros(max(nums),1);
for a = 1:max(nums); counts(a) = sum(nums>=a); end;
figure; plot(counts,'LineWidth',2); xlabel('Frame number'); ylabel('Number of tracking points'); ylim([0, round(length(IDs)*50)/50 ]); grid on;
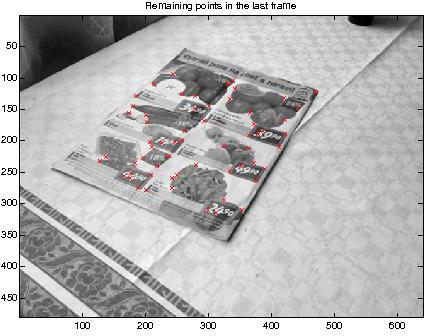
img = im2double(rgb2gray(imread('billa_jpg_283.jpeg')));
figure; imagesc(img); colormap gray; axis image; hold on;
plot(xHistory.x(end-counts(end)+1:end),xHistory.y(end-counts(end)+1:end),'Color',hsv2rgb(0,0.9,1),'Marker','x','LineStyle','none');
title('Remaining points in the last frame');
else
fprintf('Bad xHistory format\n\n');
end
else
fprintf('Result file homography.mat not found\n\n');
end
homografie dle odevzdaneho .mat souboru
if (exist('homography.mat','file'))
load ('homography_ref.mat'); hHistoryRef = hHistory; xHistoryRef = xHistory; load ('homography.mat');
H = eye(3);
for a = 1:length(hHistory); H = (hHistory{a}./hHistory{a}(3,3)) * H; end
Href = eye(3);
for a = 1:length(hHistoryRef); Href = (hHistoryRef{a}./hHistoryRef{a}(3,3)) * Href; end
fprintf('Your homography result:\n'); disp(H/H(3,3));
fprintf('Our homography result:\n'); disp(Href/Href(3,3));
tmp = H * [data.xRect; data.yRect; ones(size(data.xRect))];
dataOut.xRect = tmp(1,:)./tmp(3,:); dataOut.yRect = tmp(2,:)./tmp(3,:);
fprintf('Your transformed rectangle:\n'); disp([dataOut.xRect; dataOut.yRect]);
tmp = Href * [data.xRect; data.yRect; ones(size(data.xRect))];
dataRef.xRect = tmp(1,:)./tmp(3,:); dataRef.yRect = tmp(2,:)./tmp(3,:);
fprintf('Our transformed rectangle:\n'); disp([dataRef.xRect; dataRef.yRect]);
fprintf('Transforming difference:\n'); disp([dataRef.xRect - dataOut.xRect; dataRef.yRect - dataOut.yRect]);
else
fprintf('Result file homography.mat not found\n\n');
end
Your homography result:
0.9036 -0.5188 216.2183
0.3478 0.4029 15.6236
0.0001 -0.0003 1.0000
Our homography result:
0.6486 -0.5466 242.7290
0.2219 0.3673 22.9926
-0.0002 -0.0006 1.0000
Your transformed rectangle:
400.1807 387.9550 333.7946 346.6188
189.7684 204.1364 183.6203 169.3655
Our transformed rectangle:
406.8251 396.3648 343.2060 354.7411
180.3197 198.2280 179.1135 161.9064
Transforming difference:
6.6444 8.4098 9.4114 8.1223
-9.4487 -5.9084 -4.5069 -7.4592

vypocet homografie z bodu, kontrola processMpvFrame
load ('homographyPoints.mat');
options.rnsc_threshold = 5; options.rnsc_confidence = 0.99;
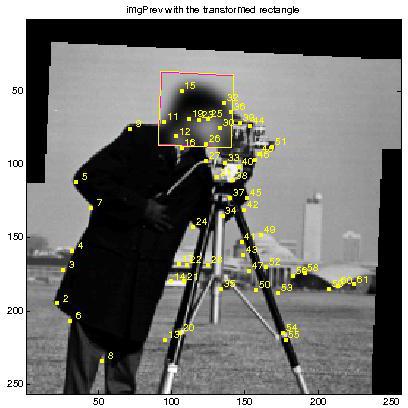
figure; imagesc(imgPrev); colormap gray; axis image;
line([data.xRect data.xRect(1)],[data.yRect data.yRect(1)], 'color', 'y');
title('imgPrev with the original rectangle');
figure;
tic; [dataOut xNewOut] = processMpvFrame(data,imgPrev,imgNew,xPrev,xNew,options); t=toc;
fprintf('Found %d inliers %.2f percent of tentative correspondences in %.3f sec.\n\n', length(xNewOut.ID), 100*length(xNewOut.ID)/length(xNew.ID), t);
fprintf('Homography matrix:\n'); disp(dataOut.H);
fprintf('Transformed rectangle:\n'); disp([dataOut.xRect; dataOut.yRect]);
tic; [dataOut xNewOut] = processMpvFrame(data,imgPrev,imgNew,xPrev,xNew,options); t=toc;
fprintf('Found %d inliers %.2f percent of tentative correspondences in %.3f sec.\n\n', length(xNewOut.ID), 100*length(xNewOut.ID)/length(xNew.ID), t);
fprintf('Homography matrix:\n'); disp(dataOut.H);
fprintf('Transformed rectangle:\n'); disp([dataOut.xRect; dataOut.yRect]);
tic; [dataOut xNewOut] = processMpvFrame(data,imgPrev,imgNew,xPrev,xNew,options); t=toc;
fprintf('Found %d inliers %.2f percent of tentative correspondences in %.3f sec.\n\n', length(xNewOut.ID), 100*length(xNewOut.ID)/length(xNew.ID), t);
fprintf('Homography matrix:\n'); disp(dataOut.H);
fprintf('Transformed rectangle:\n'); disp([dataOut.xRect; dataOut.yRect]);
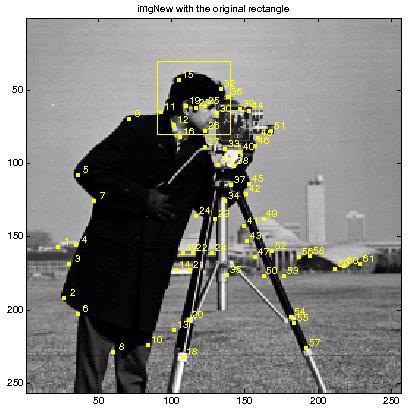
title('imgNew with the transformed rectangle');
Found 100 inliers 100.00 percent of tentative correspondences in 0.155 sec.
Homography matrix:
-0.0147 0.0017 -0.9576
-0.0017 -0.0144 0.2869
-0.0000 0.0000 -0.0150
Transformed rectangle:
326.8801 323.5107 265.1654 268.5445
176.9658 205.7722 199.0474 170.2281
Found 100 inliers 100.00 percent of tentative correspondences in 0.091 sec.
Homography matrix:
-0.0141 0.0019 -0.9467
-0.0019 -0.0135 0.3212
-0.0000 0.0000 -0.0143
Transformed rectangle:
326.6500 323.4612 265.6960 269.0391
176.0453 204.6714 197.3288 168.6121
Found 100 inliers 100.00 percent of tentative correspondences in 0.086 sec.
Homography matrix:
0.0149 -0.0015 0.9320
0.0018 0.0149 -0.3614
0.0000 0.0000 0.0151
Transformed rectangle:
326.9826 323.6669 265.5574 268.8273
176.3527 205.4347 198.6454 169.5145
harris detektor, kontrola track_init (byl-li implentovan)
if (exist('track_init','file'))
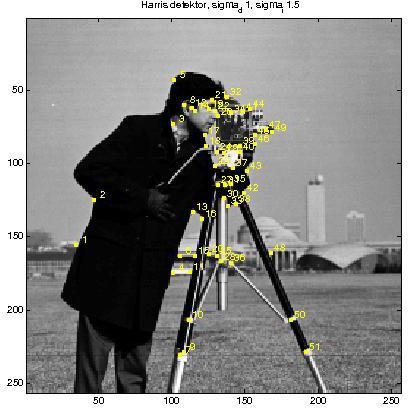
imgPrev = im2double(imread('cameraman.tif')); [h w]=size(imgPrev);
options.sigma_d = 1; options.sigma_i = 1.5; options.thresh = 0.080^4; options.ps = 11;
options.ROI = [1 1 h w];
xPrev = track_init(imgPrev, options);
fprintf('Found %d harris points.\n\n',length(xPrev.x));
figure; imagesc(imgPrev); colormap gray; axis image; showPoints(xPrev);title('Harris detektor, sigma_d 1, sigma_i 1.5');
else
fprintf('track_init.m not implemented\n\n');
end
Found 51 harris points.
kontrola sledovani
cv08
Found 61 points of interest.
Found 56 inliers 100.00 percent of tentative correspondences.
Original transformation matrix:
1.0000 0.0500 -5.0000
-0.0500 1.0000 -2.0000
0 0 1.0000
Your homography matrix:
1.0225 0.0630 -7.9041
-0.0610 1.0302 -2.3942
-0.0000 0.0001 1.0000
Referece rectangle:
93.1671 90.6733 140.5486 143.0424
36.6584 86.5337 89.0274 39.1521
Your transformed rectangle:
93.7834 91.2933 140.4731 142.6686
37.1066 86.1418 89.0463 39.9989
Transformation error:
-0.6163 -0.6200 0.0755 0.3738
-0.4483 0.3919 -0.0188 -0.8467