| Tomas Pajdla: |
Diplomové, bakalářské a semestrální práce 2005 |
|
| Témata budou upřesněna, aby odpovídala type práce (DP, BP, SP). | ||
 |
Prostorová rekonstrukce elektro-encefalografických elektrod z fotografií | |
| Pro identifikaci
aktivních oblastí mozku v souvislosti s jeho aktivací je používána
projekce elektrické aktivity mozku (elektroencefalogram – EEG s vysokým
časovým rozlišením) na anatomické obrazy (magnetická rezonance – MRI s
vysokým prostorovým rozlišením). EEG je snímáno pomocí soustavy elektrod,
jejichž relativní polohu v prostoru je nutno znát, aby bylo možno EEG data
"nasadit" na MRI snímek. Seznamte se s metodami rekonstrukce prostorového modelu z fotografií. Navrhněte, implementujte a ověřte systém pro rekonstrukci 3D modelu elektrod z fotografií. Budeme spolupracovat s Ing. Janem Kremláčkem, PhD., Ústav patologické
fyziologie, Lékařská fakulta v Hradci Králové, Univerzita Karlova v Praze. |
||
|
|
|
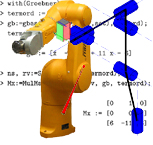
Algebra, geometrie a kinematika systému oko-ruka |
|
Kinematika je geometrie a geometrie je algebra.
Geometrii robotu lze popsat soustavou
algebraických rovnic, jejichž řešením lze získat inverzní
kinematickou úlohu. Je známa metoda, která řešení najde pro
obecný seriový manipulár se šesti stupni volnosti: D. Manocha and
J.F. Canny. Efficient inverse kinematics for general 6R manipulators. IEEE
Journal on Robotics and Automation, pages 648-657, 1994. Seznamte
se s počítačovými algebraickými systémy Maple a Macaulay2, a
implementujte řešení inverzní kinematické úlohy. Formulujte
problém kalibrace kamery a manipulátoru jako inverzní kinematickou
úlohu s více stupni volnosti. Studujte, čeho lze se současnými
počítačovými algebraickými systémy dosáhnout. |
||
|
|
Plánování optimální trajektorie pro laserové robotické svařování | |
|
Laserové robotické svařování - extrémní
požadavky na přesnost měření, řízení a kalibrace
laseru i robotu.
Seznamte se s kinematikou manipulátoru s šesti stupni volnosti nesoucího svářecí laser a s optimalizací trajektorie robotu. Implementujte simulátor manipulátoru v Matlabu, porovnejte výsledky s měřeními na reálném průmyslovém systému v Neovision s.r.o. Navrhněte a testujte metodu plánování optimální trajektorie. |
||
 |
|
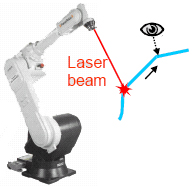
Analýza tvaru laserové stopy |
|
Přesné polohování manilulátoru si
žádá přesné měření jeho polohy.
Seznamte se s technikami kalibrace kamery a detekce objektu v obraze. Navrhněte a implementujte v Matlabu metodu měření tvaru laserové stopy kamerou. Demonstrujte funkčnost metody na průmyslovém systému v Neovision s.r.o. |
||
|
|
|
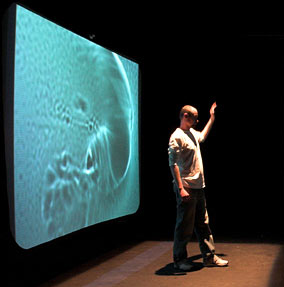
Digitální interaktivní umění |
|
Dílo
je tu jen jednou, každému to jeho, jen pokud se tvoří. Seznamte se s technikami sledování polohy člověka ve videosekvenci. Implementujte programový modul sledování polohy člověka v reálném čase a demonstrujte jeho funkčnost. Modul integrujte do systému syntézy obrazu (existujícího v CMP), který reaguje na polohu člověka. Budeme spolupracovat s
Federico Diazem a uměleckou skupinou E-AREA. |
||
|
|
|
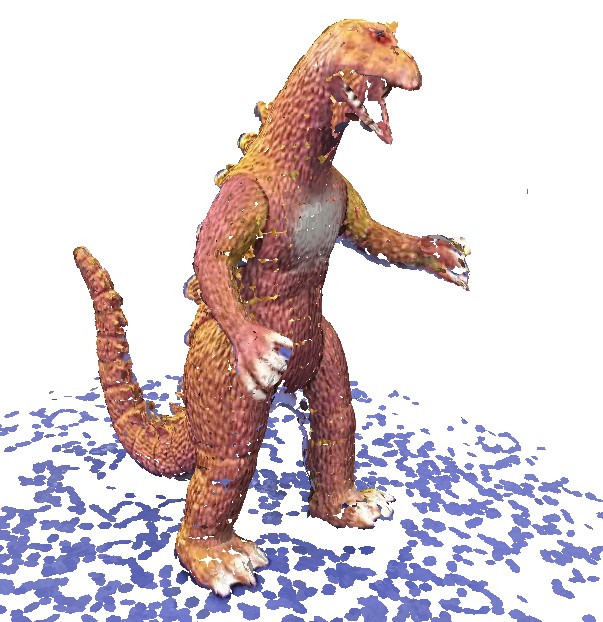
Automatická rekonstrukce 3D scény z jejích obrazů |
|
Rekonstrukce 3D scény z obrazů - "svatý
grál" počítačového vidění. Seznamte se s tecnikami rekonstrukce 3D scéby z jejích obrazů. Navrhněte a efektivně implementujte v Matlabu a C algoritmus D.Martinec, T.Pajdla. 3D Reconstruction by Fitting Low-Rank Matrices with Missing Data. CVPR 2005, pp. 198-205, IEEE June 2005.rekonstrukce z mnoha snímků. Pořiďte nová data a demonstrujte na nich funkčnost algoritmu. |
||
 |
|
Analýza všesměrového obrazu pro řízení automobilu |
|
"Automatický řidič," zamumlal Farin. "Zázrak
techniky!" (J.M.Troska: Kapitán Nemo I. Nemova říše) Zaměříme se na sledování vlastní polohy automobilu z panoramatického snímku okolí automobilu s cílem zvládnout pomalé, ale složité manévry, jako je zajíždění do řady stojících automobilů. Seznamte se s určením polohy pohybující se všesměrové kamery, implementujte určení její trajektorie a navrhněte algoritmus parkovacího manévru. Branislav Micusik. Two-View Geometry of Omnidirectional Cameras. Phd thesis, Department of Cybernetics, Faculty of Electrical Engineering, Czech Technical University, Prague, Czech Republic, June 2004. |
||