Adaptivní systémy s referenčním modelem
Pavel Píša ( pisa@cmp.felk.cvut.cz )
1
Adaptace s referenčním modelem
Účelem adaptace s referenčním modelem, je taková změna dynamiky řízeného systému, aby se choval stejně jako model požadované dynamiky systému. Většinou je před řízený systém přidán regulátor a odezva sytému složeného z regulátoru a řízeného systému je porovnávána s odezvou modelu požadovaného chování. Dále je celý systém doplněn pomalejší zpětnou vazbou obsahující adaptační pravidla, která má za úkol nastavit parametry regulátoru tak, aby minimalizoval odchylku mezi výstupem z řízeného systému a modelem.
V následujícím textu bude nejdříve odvozen gradientní přístup k minimalizaci odchylky využívající kriteriální funkce. Ve druhé části bude ovozena ljapunovská metoda pro nastavování pravidel, která se snaží řešit nejen stabilitu vlastního regulátoru, ale celé soustavy obsahující i model a adaptační pravidla.
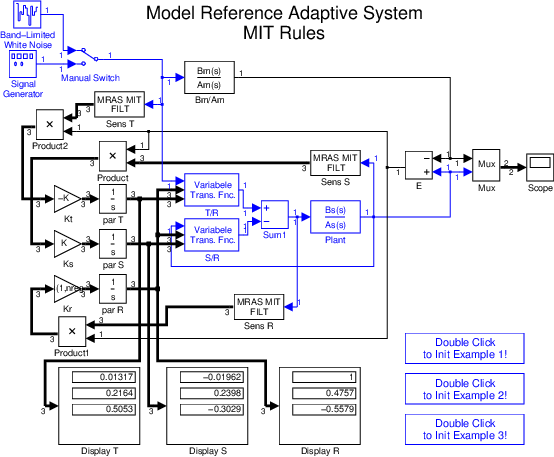
Hlavním cílem této práce bylo odvodit co nejobecnější pravidla použitelná pro lineární systémy libovolného řádu s jedním vstupem a výstupem. Výsledky byly testovány v prostředí Simulinku, kde byly sestaveny následující modely :
Navržené modely se vyznačují poměrně dobrou adaptací a možností testování pro libovolný řád regulátoru, parametry modelu a řízeného systému. Modely obsahují i možnost vyvolání příkladových parametrů pro regulátory a systémy prvního až třetího řádu. Experimenty ovšem ukazují, že navržené modely ztrácí dobré vlastnosti rychlosti a stability adaptace pro vyšší řády (
) systému a regulátoru.
2
Gradientní metody
Adaptační pravidla mají za úkol nastavit parametry regulátoru
tak, aby rozdíl
mezi výstupem
regulovaného systému
a výstupem
modelu požadovaného chování
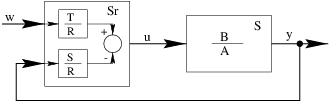
byl nulový. Obecný tvar lineárního regulátoru pro systém s jedním vstupem i výstupem je lineární regulátor se dvěma stupni volnosti, který lze charakterizovat parametry přenosových funkcí
,
a
. Schéma je uvedeno na obrázku
1. Přenos celé soustavy
by se měl po adaptaci blížit přenosu modelu
.
Pro parametry regulátoru platí následující podmínky :
-
pro póly :
-
pro nuly : , kde představuje stabilní část polynomu
Dostatečně stabilní nuly obsažené v
se nemusí nacházet v modelu (
), protože je lze krátit. Nestabilní nuly (
) krátit nelze, protože po jejich vykrácení by se v systému objevily neřiditelné nestabilní stavy. Proto model požadovaného chování musí nestabilní část
obsahovat v
. Pak pro parametry
,
platí rovnice
ve které
představuje libovolný stabilní polynom dostatečného stupně odpovídající dynamice observeru. Minimální stupeň vychází z nerovností
a
. Protože
dělitelí
musí ke splnění rovnosti dělit i
, pak
. Předchozí rovnici lze tedy řešit jako diofantovskou rovnici:
jejím vyřešením jsou získány hodnoty
a
a po dosazení bude platit i rovnice (
1). Polynom
lze vypočítat z rovnice
kde
získáme po krácení polynomu
polynomem
.
Podmínky řešitelnosti rovnic a návrhu regulátoru :
-
-
nelze zmenšovat
-
nelze odstranit nestabilní nuly je nutné je znát předem a zahrnout do modelu
Předchozí výpočty ukazují, že pro každý systém lze za splnění předchozích podmínek regulátorem docílit jeho chování shodné s modelem požadované dynamiky. Nyní je nutné odvodit adaptační pravidla, která budou nastavovat parametry regulátoru
, konkrétně
,
a
tak, aby se chyba sledování
blížila nule.
Gradientní metoda využívá minimalizace kriteriální funkce
změnou parametrů
. V předchozím vztahu je nutné
volit dostatečně malé, aby nedošlo k destabilizaci celého regulačního obvodu. Konkrétní volba kritéria ovlivňuje výsledná adaptační pravidla. Nejčastěli používaná pravidla :
-
pak adaptační pravidla pro gradientní metodu vycházejí ve tvaru
kdyby
bylo příliš velké, není přiblížení parciální derivací bez zahrnutí změn parametrů stabilní
je citlivostní model systému
-
tvar pravidel
nebo po zjednodušení
-
pro odstranění závislosti na amplitudě se také používá normalizace adaptačních pravidel
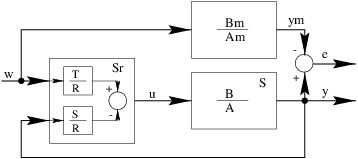
Na obrázku
2 je opět zobrazen regulátor a regulovaný systém doplněný modelem požadovaného chování. Systém lze popsat následujícími rovnicemi :
-
-
Ze vhodně zvolených přenosů v systému lze vyjádřit citlivostní funkce v jednoduchém tvaru. Pro jejich výpočet není nutné uvažovat v rozdílu
parciální derivaci
, protože model
není na ladění parametrů závislý.
-
-
-
Je nutné upozornit, že indexy v polynomech
,
a
jsou v tomto případě uvažovány od nejvyšší mocniny
směrem k mocnině nejnižší ( obdobně jako v modelech v Matlabu, kde je ovšem indexace prováděna od
do
). Po zkonvergování parametrů do ideálního stavu bude platit
a tuto aproximaci lze většinou použít i v počátku adaptace. Adaptační pravidla stále obsahují
. Polynom
v předchozí aproximaci lze však zkrátit podle (
2). Pro systém obsahující pouze stabilní nuly lze psát
. Po zkrácení zbývá pouze
. Konstantu
lze zahrnout do konstanty rychlosti adaptace
, pouze je nutné respektovat její znaménko. Pak lze předchozí rovnice dosadit do rovnic pro adaptaci parametrů
regulátoru ( například do (
4) ) :
-
-
-
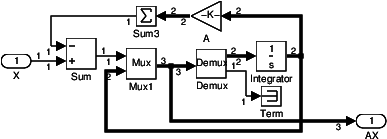
Na obrázku
4 je model spojitého adaptivního systému obecného řádu, který využívá výše odvozené gradientní metody. Obrázek
3 zobrazuje filtr pro výpočet vektor členů citlivostních funkcí
. Shodný tvar filtru je použit pro všechny tři nastavované parametry, ovšem pro parametr
je výsledek násoben nulou a integrátor je přednastaven na hodnotu
. Podobný model lze sestrojit i pro diskrétní systém.
3
Ljapunovská metoda
Ljapunovská metoda se nesnaží stabilizovat pouze adaptovaný systém, ale vyšetřuje stabilitu celé soustavy složené z řízeného systému, modelu, regulátoru a adaptačních pravidel. Základem vyšetřování stability ve velkém je hledání ljapunovské funkce, kterou si lze představit jako součet veškeré “energie” v systému. Je-li derivace v čase této funkce až na jeden bod stavového prostoru
záporná, musí postupně dojít k úniku/vyčerpání “energie” ze systému a k přechodu systému do bodu
. Následuje matematický zápis požadavků na ljapunovskou funkci za předpokladu, že rovnovážný bod systému se nachází v počátku souřadného systému ( transformace
):
-
,
-
:
,
diferencovatelná přes
a
pozitivně definitní
Potom je systém v okolí počátku stabilní, jestliže platí
-
,
-
pro všechna , to znamená, že je negativně (semi)definitní
V následujících odstavcích je odvozeno jak lze využít ljapunovské stability pro syntézu stabilního adaptivního regulátoru.
Úkolem je pro systém
nalézt takový regulátor a adaptační pravidla aby se systém choval shodně jako zadaný modelový systém
. Úloha nebude řešena zcela obecně. Jak je upozorněno v [
HAV_ASY_PRED] pro sestrojení takovéhoto adaptivního regulátoru vyššího řádu je nutné, aby byly všechny stavy regulovaného systému
měřitelné. Proto jako výstup systému i modelu budou brány stavy
a
. Adaptační pravidla mají za úkol ladit parametry regulátoru
tak, aby se limitně blížily optimálnímu nastavení regulátoru
a rozdíl výstupů modelu a systému
se blížil
. Je tedy nutné hledat hyperstabilitu systému se stavem
.
Pro zjednodušení problému bude uvažován pouze požadovaný model chování systému ve tvaru filtru
-tého řádu s nastavitelným zesílením (
). Tento předpoklad není příliš omezující, protože právě výsledná odezva ve tvaru filtru s vhodným tlumením je většinou požadována. Při programovém řízení lze jiného chování též docílit transformací průběhu vstupního signálu.
Dále jak bylo ukázáno v [
S_TDS] lze dynamiku ( vlastní čísla
matice systému
) libovolného systému téměř libovolně změnit zavedením stavové zpětné vazby
do vstupu systému
. Pro další výpočty je vhodné předpokládat model požadovaného chování
s maticemi
a
ve Frobeniově kanonickém tvaru. Tento předpoklad neomezuje obecnost řešení, protože jak bylo ukázano v [
S_TDS] lze stavy a matice každého systému do tohoto tvaru převést. Při jiném než Frobeniově tvaru požadovaného chování je tedy nutné stav modelu
i měřený stav regulovaného systému
násobit transformační maticí
, kterou lze vypočítat
.
a
jsou matice dosažitelnosti původního a transformovaného modelu systému
a
.
Za uvedených předpokladů zle sestavit následující rovnice pro chování systému
a modelu
.
-
,
-
Kde
je vstup do systému,
,
,
a
jsou matice řízeného systému
a modelu
,
a
jsou stavy řízeného systému a modelu a
je vstup do řízeného systému
. Řádkový vektor
představuje stavovou zpětnou vazbu přidanou k systému
a skalár
řídí zesílení vstupního signálu do systému
. Pak lze rozdíl
mezi skutečným stavem
systému
požadovaným stavem
vyjádřit :
po přidání členu
lze rovnici upravit :
Pro každý z výrazů označených
je nutné aby se po provedení adaptace blížily nule. Podaří-li se provedením adaptace vynulovat poslední dva výrazy, dojde postupně k vynulováni odchylky, protože diferenciální rovnice
obsahuje matici modelu
, která odpovídá stabilnímu systému. Frobeniův tvar matice
byl zvolen pro vhodné vyjádření druhého z výrazů
, který lze znázornit pro systém třetího řádu následovně :
Po úpravě přejde na matici, která bude dále označvána jako
Jak je vidět, že lze vhodným nastavením zpětné vazby
docílit vyulování tohoto výrazu. Třetí výraz lze též upravit a bude dále označován jako
Nyní lze sestrojit ljapunovskou funkci s parametry, které budou vyjadřovat vzdálenost od požadovaného stavu, kdy dojde k vynulování všech výrazů
.
Součet skalárů s maticemi ve výrazu lze přepsat jako součet matice a jednotkové matice násobené skalárem. Derivce ljapunovské funkce v čase tedy bude
Zápis se zjednoduší při náhradě výrazů v závorkách výše zavedenými symboly
a
.
Dále lze dosadit za
Matice stabilního modelu
je negativně definitní, proto člen
bude pro nenulové
záporný. Ostatní členy lze vhodnou volbou adaptačních pravidel také zajistit nulové.
Při předpokládaném tvaru matice
a vektoru
lze vzorce rozepsat
Aby výrazy nabývaly nulové hodnoty pro všechny hodnoty
a
, je nutné aby si v předchozích rovnicích byly rovné jednotlivé členy v rozepsaných tvarech. Po další úpravě lze výsledky psát ve tvaru
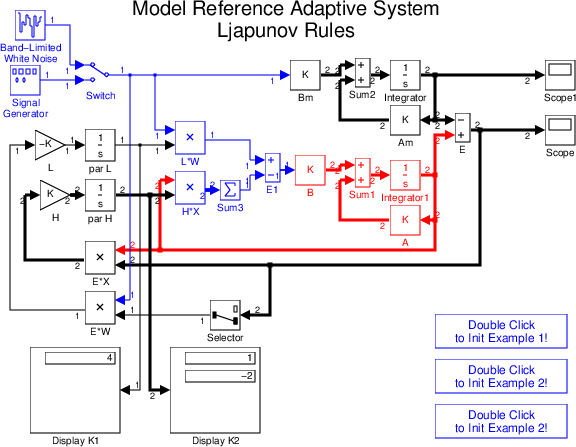
Na obrázku
5 je zobrazen model s výše uvedenými adaptačními pravidly. Tento model vykazuje velmi uspokojivé výsledky pro první a druhý řád. Doba adaptace pro třetí řád systému je již poměrně dlouhá.
References
1Přednášky z předmětu adaptivní systémy, Havlena, Praha 1997
2Teorie dynamických systémů, Štecha Havlena, Praha 1993