Σ-Integration Analog to Digital Converter, Idea, Implementation and ResultsPavel Píša, Petr Porazil |
|
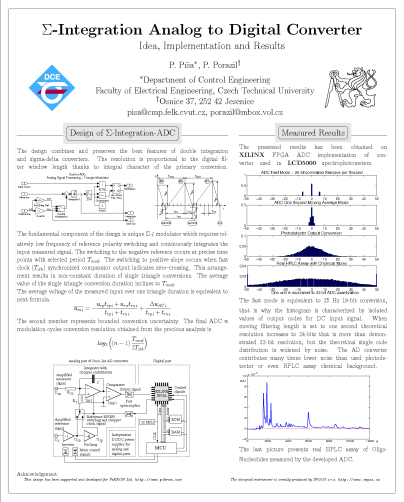 |
The paper presents a new analog signal to digital representation conversion technique. The proposed approach tries to combine and preserve significant excellent features of double integration and sigma-delta analog to digital converters. The proposed AD-converter is constructed for a direct conversion of two analog signals ratio to the digital domain. The design uses an oversampling technique and the digital output resolution and bandwidth can be tuned by digital data post-processing. Other outstanding feature is an accurate area under signal curve measurement. The output data rate is constant (unlike for voltage- frequency converters) and the response time is maintained short without need of high modulator switching frequency. The described AD-converter features are a big advantage for the spectrophotometric absorbance measurement. Most of other measurement applications of AD-converters request mainly a great relative accuracy of conversion, but the absorbance is computed as a logarithm of the measured ratio between the measurement and the reference optical sensor response. The developed converter is already successfully used in serially produced UV-VIS spectrophotometric HPLC detectors. The converter has some drawback as well, the borders of sampling interval burden by some jitter although it has no influence on accumulated area computation. |
|
Spectrophotometric detector LCD 5000, a instrument for which SumInt ADC technique has been designed. PÍŠA, Pavel; PORAZIL, Petr. Σ-Integration Analog to Digital Converter, Idea, Implementation and Results. IFAC Proceedings Volumes, 2005, 38.1: 85-90., Congress of the International Federation of Automatic Control. 16th IFAC World Congress: article online https://www.sciencedirect.com/science/article/pii/S1474667016372056 Actual development of this techique designed at PiKRON company continues as the project funded by European Space Agency. See PiKRON's Open-Source SumInt ADC project Open-Source SumInt ADC project Wiki The results has been presented on 9th International Workshop on Analogue and Mixed-Signal Integrated Circuits for Space Applications, article and presentation for the contribution Implementation and Evaluation of Sum-Int ADC IP-core on NanoXplore FPGA are available - article, presentation |
|
uLan Communication Protocol for Laboratory Instruments, Home Automation and Field ApplicationsPavel Píša, Petr Smolík |
|
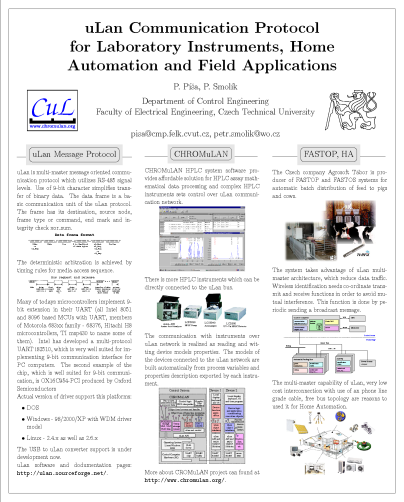 |
The uLan protocol is message oriented multi-master communication protocol for microcontrollers. It uses 9-bit character format for addressing and link control and RS-485 physical layer. The protocol is used in HPLC instruments and analyzers for instruments control and data acquisition. The protocol has potential to be used in the home automa- tion applications and some other industrial field applications for its open nature design and proven implementation. The software support is provided for more RS-485 cards, con- verters for PC RS-232 ports and embedded microcontrollers. One of applications utilizing uLan communication is CHROMuLAN HPLC system software, which provides afordable solution for HPLC assay mathematical data processing and complex HPLC instruments sets control over uLan communication network. Other successful field example utilizing uLan communication is agriculture automatic feeding system. |
|
uLan project: http://ulan.sourceforge.net/ CHROMuLAN project: http://www.chromulan.org/ CHROMuLAN development at SourceForge : https://sourceforge.net/projects/chromulan/ |
|
Controllers for Standard and Parallel RobotsPavel Píša, Ondřej Vysoký |
|
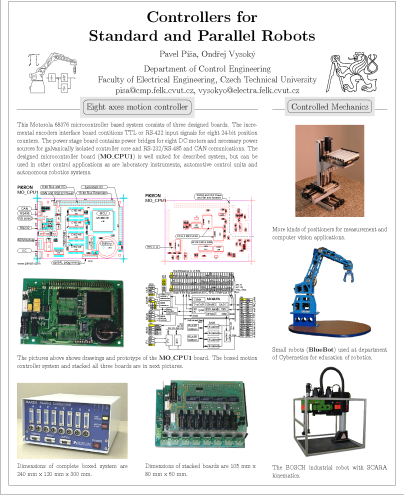 |
There are discussed results of development of motion controllers and control algorithms for robots with standard and parallel kinematics. Reason for parallel robot kinematics research is promise to achieve higher stifness and to lower mass of moving parts for the parallel configuration of actuators, when compared with classical serial joints and actuators connection. Computational intensive coordinates transformations and powerful enough motion controller hardware are necessary for control of parallel robots. The first practical results of our research are demonstrated on the model of planar parallel robot developed at Department of Mechanics, at Faculty of Mechanical Engineering. Comparison of low level (C language) and high level language (Matlab/Simulink) development approach to the problem of motion control algorithms is next discussed topic. The compact motion controller for educational and industrial manipulators and robots developed in cooperation with an development company is an example of successful development based on free GNU C and GNU debugger development environment. |
|
MARS 8 Motion and Position Controller Book about PXMC controller: Konrad R. Skup Motion Control for Mobile Robots: Basics and Concepts of PXMC Library for Brushless DC Motors Řídicí jednotka s mikrokontrolérem MC68376 - článek na HW.CZ
|
|
Reduction of Antagonistic Behavior of Redundant Motion ServosystemPavel Píša, Ondřej Vysoký |
|
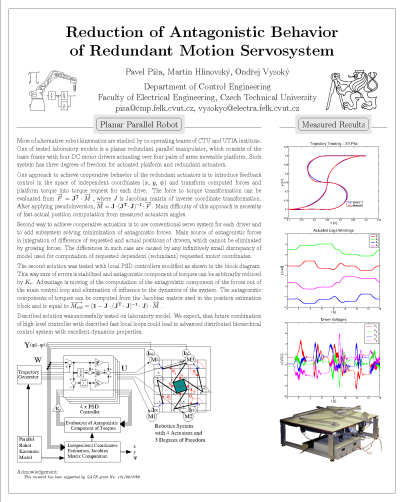 |
Redundant actuation of parallel robots cannot be controlled by simple local servo-control- lers, because of mutual coupling of systems would lead to controller fighting even for infinitively small disproportion between model and real mechanics system. On the other hand elegant solution of this problem should lead to higher stiffness of the redundant parallel robotics or manipulator system than can be achieved for conventional serial connection of actuated joints. Lower mass of moving parts without actuators load enables faster accelerations and transition speeds as well. High level controllers can globally solve problem to control robots with higher number of actuators than number of degrees of freedom, but these solutions requires powerful centralized control system. Our solution is based on simpler approach of fast local servosystem loops and global coordinator of trajectory generation and fast loops supervisor. This approach is better suited for distributed controllers and intelligent motors. The first implementation of described solution was successfully tested on laboratory model of planar parallel robot. |
Robotics Controllers Hardware, Software and Algorithms DesignPavel Píša, Ondřej Vysoký |
|
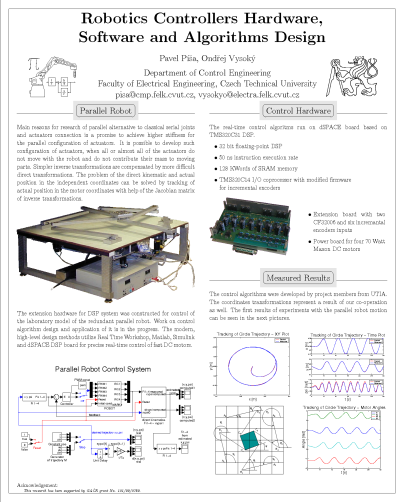 |
The extension hardware for DSP system was constructed for control of the laboratory model of the redundant parallel robot. Control algorithms has been developed together with Czech Academy of Scientists - UTIA institute. The modern, high-level design methods utilize Real Time Workshop, Matlab, Simulink and dSPACE DSP board for precise real-time control of fast DC motors. |
System for Online Internal Combustion Engines OptimizationPavel Píša, Ondřej Vysoký |
|
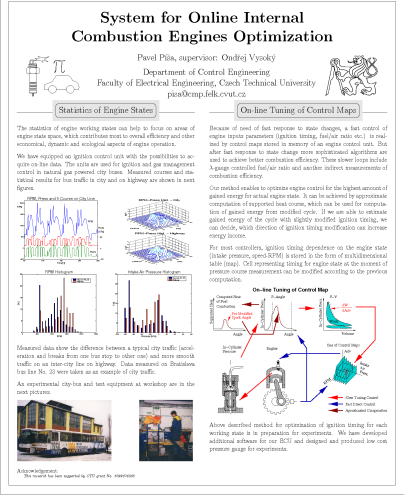 |
One of our development and research activities is engaged in on-road measurement and improvement of car and bus combustion engines con- trol. We are not able to compete in multi-million business of the mass car production market, but demand of flexible control systems for special purpose spark-ignition engines is high. For example, we are cooperating on the project, which uses natural gas powered engines for city trafic. This presentation is intended to review principles of combustion engine operation, to show some of the basic problems in combustion engine con- trol, to present some possible ways in on-road measurement on an engine and to outline possible ways to improve and automate engine adjustment procedure. |
Minimal Thesis - Měření a řízení zážehového motoru
Combustion Engine Control - introduction and overview
|
|