|
Symmetric Object Detection
|
 |
My PhD thesis deals with application of symmetry principles to computer
vision problems of object detection in images. The focus is put on the
ways how our prior knowledge on translation, reflection and rotation
symmetries can be encoded in probabilistic models. Conceptually the
position of our object-centered approach lies between general symmetry
detection and strongly informed procedural modeling.
In particular we present two previously published methods for parsing
of facade images, where translation symmetry manifests in the structure
of architectural elements like windows, doors and cornices. In both
cases the structural model is based on local interactions between
objects and the symmetry is represented in the spirit of Gestaltian
grouping principles of proximity, similarity and continuity.
In addition the last method explores the
remaining reflection and rotation symmetries. At this time the Bayesian
inference is used to handle a hierarchical model extending from the
low-level geometry of reflection symmetry to dihedral symmetry groups.
Objectness and compactness priors are included to reduce ambiguity in
the detection. The increased complexity of the model is compensated by
utilization of an advanced inference method, which allows to rigorously
reason about number of detected components by means of model selection.
In result we show this approach improves performance on standard
datasets, particularly in the case when multiple objects are present.
Probabilistic
Models for Symmetric Object Detection in Images 
Czech Technical University,
November 2015. Presentation.
|
|
Spatial Pattern Templates
|
 |
We
propose a method for semantic parsing of images with regular structure.
The structured objects are modeled in a densely connected CRF. The
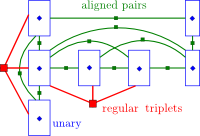
paper describes how to embody specific spatial relations in a
representation called Spatial Pattern Templates (SPT), which allows us
to capture regularity constraints of alignment and equal spacing in
pairwise and ternary potentials.
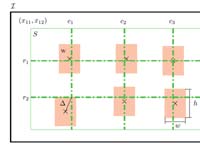
Assuming the input image is
pre-segmented to salient regions the SPT describe which segments could
interact in the structured graphical model. The model parameters are
learnt to describe the formal language of semantic labelings. Given an
input image, a consistent labeling over its segments linked in the CRF
is recognized as a word from this language.
The CRF framework allows
us to apply efficient algorithms for both recognition and learning. We
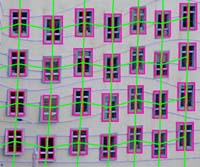
demonstrate the approach on the problem of facade image parsing and
show that results comparable with state of the art methods.
Spatial
Pattern Templates for Recognition of Objects with Regular Structure
Proc. of GCPR, September 2013. (oral)
Presentation.
Results:
ECP-Monge eTrimsDB
Dataset: CMP Facade Database |
|
Weak Structure Model
|
 |
We present a method for recognition of structured images and demonstrate it on the detection of windows in facade images. Given an ability to obtain
local low-level data evidence on primitive elements of a structure (like window in a facade image), we determine their most probable number, attribute values (location, size) and neighborhood relation.
The embedded structure is weakly modeled by pair-wise attribute constraints,
which allow structure and attributes to mutually support each other.
We use a very general framework of reversible jump MCMC, which allows simple implementation of a specific structure model and plug-in of almost arbitrary element classifiers.
We have chosen the domain of window recognition in facade images to demonstrate that the result is an efficient algorithm achieving performance of other strongly informed methods for regular structures.
Stochastic
Recognition of Regular Structures in Facade Images
IPSJ Trans. Computer Vision and Applications,
May 2012. Demo.
A Weak Structure Model for Regular Pattern Recognition Applied to Facade Images
Proc. of ACCV, November 2010. (oral) Video. |
|
Symmetries for Structural Recognition
|
 |
We propose a method for semantic parsing of images with regular structure. The structured objects are modeled in a densely connected CRF. The paper describes how to embody specific spatial relations in a representation called Spatial Pattern Templates (SPT), which allows us to capture regularity constraints of alignment and equal spacing in pairwise and ternary potentials.
Assuming the input image is pre-segmented to salient regions the SPT describe which segments could interact in the structured graphical model. The model parameters are learnt to describe the formal language of semantic labelings. Given an input image, a consistent labeling over its segments linked in the CRF is recognized as a word from this language.
The CRF framework allows us to apply efficient algorithms for both recognition and learning. We demonstrate the approach on the problem of facade image parsing and show that results comparable with state of the art methods.
Modeling Symmetries
for Stochastic Structural Recognition
Stochastic Image Grammars workshop, Proc. of ICCV, November 2011. |
|
Surface Mesh Refinement
|
 |
We
propose a pipeline for accurate 3D reconstruction from multiple images
that deals with some of the possible sources of inaccuracy present in
the input data.
Namely, we address the problem of inaccurate camera calibration by including a
method adjusting the camera parameters in a global structure-and-motion
problem, which is solved with a depth map for representation that is
suitable to large scenes.
Secondly,
we take the triangular mesh and calibration improved by the global
method in the first phase to refine the surface both geometrically and
radiometrically. Here
we propose surface energy which combines photoconsistency with contour
matching and minimize it with a gradient descent method.
Our main contribution lies
in effective computation of the gradient that naturally balances weight
between regularizing and data terms by employing scale space approach
to find the correct local minimum.
The results are demonstrated on standard high-resolution datasets and a
complex outdoor scene.
Refinement
of
Surface Mesh for Accurate Multi-View Reconstruction
International Journal of Virtual Reality, March 2010. (extended
version, pre-print)
Presented at
Modeling-3D workshop, Proc. of ACCV,
September 2009. Supplemental
video. Presentation. |
|
Depth Map Fusion
|
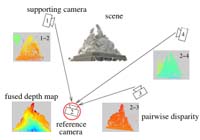 |
We present a novel algorithm for image-based surface reconstruction from a set of calibrated images.
The problem is formulated in Bayesian framework, where estimates of depth and visibility in a set of selected cameras are iteratively improved.
The core of the algorithm is the minimisation of overall geometric L2 error between measured 3D points and the depth estimates.
In the visibility estimation task, the algorithm aims at outlier detection and noise suppression, as both types of errors are often present in the stereo output.
The geometrical formulation allows for simultaneous refinement of the external camera parameters, which is an essential step for obtaining accurate results even when the calibration is not precisely known.
We show that the results obtained with our method are comparable to other state-of-the-art techniques.
Depth
Map Fusion with Camera Position Refinement
Proc. of CVWW,
February 2009. Presentation.
Representation of
Geometric objects for 3D photography
Master
thesis, CTU Prague, January 2008. Advisor: D.Martinec.
Presentation
(czech).
Awarded Dean's
prize for outstanding Master thesis. |


