Na základě navrženého postupu z úlohy 4 implementujte jednoduchý dálkoměr pro robota AVbot. Měřený bod nechte uživatele označit v prvním obraze (případně použijte jinou zvolenou metodu inicializace), v dalších pozicích ho automaticky nalezněte metodou připravenou v úloze 5. Intervaly mezi jednotlivými pozicemi a počet měření volte tak, aby vaše metoda sledování měřený bod neztratila a správně změřila vzdálenost, ale zároveň se vyhněte přehnanému prodlužování času měření (např. při milimetrových posunech určitě bod neztratíte, ale měření bude trvat zbytečně dlouho).
Navrženou a implementovanou metodu je nezbytné ověřit experimentem.
Otestujte dálkoměr na bodech v různých vzdálenostech a pod různým úhlem
vzhledem k ose pohybu AVbot-a. Vzdálenost každého bodu změřte několikrát
dálkoměrem, výsledné měření spočítejte jako průměr a chybu jako standardní
odchylku. Pak vzdálenost ověřte pásmem – je rozdíl mezi měřením
dálkoměrem a pásmem menší než odhadovaná chyba (standardní odchylka)?
Jsou rozdíly mezi měřením pásmem a AVbot-em rovnoměrně rozložené, nebo
je na nich patrná systematická chyba?
Odevzdávaná úloha
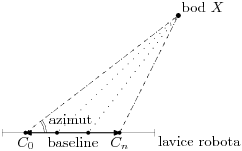
Experimenty z úkolů 2,3 je důležité správně zaznamenat: neměla by chybět skutečná vzdálenost a azimut bodu X, počet měření, použitá baseline, odhadovaná vzdálenost, odhadovaná chyba v závislosti na měněném parametru.