Master Thesis : Reconstructing 3D mesh from video sequence
Martin Bujnak,
Department of Computer Graphics and Image Processing
Faculty of Mathematics,
Physics and Informatics, Comenius University Bratislava, Slovakia.
Supervisor: RNDr. Martin Samuelcik
Aim: To obtain 3D mesh of the scene from images captured by uncalibrated hand-held camera
Key words: Structure-from-motion, Uncalibrated video, Self calibration, Feature tracking,
Dense reconstruction, Radial lens distortion
|
|
|
Abstract
This thesis aims to create complete 3D reconstruction of real scene from uncalibrated video sequence. My work deals with image features correspondence problem reduced to feature tracking throughout image sequence, camera tracking with retrieving cameras positions and camera calibration, and finally dense scene reconstruction represented in 3D mesh.
Even input consists of un-calibrated images, algorithm assumes that images were taken by camera with these restrictions to intrinsic parameters: zero-skew, principal point is at image center and aspect ratio of 1. Camera focal length can vary across the sequence. Images must be processed in the order of how they were captured. Motion between two consequent frames is assumed to be small.
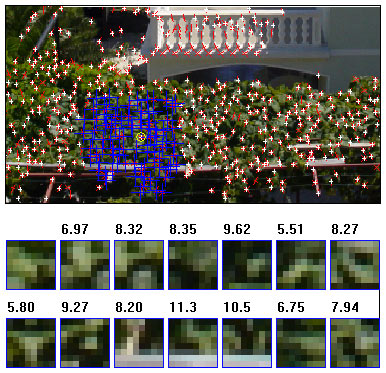
Main contribution of this work is in simple feature detector and tracker, novel fast on-line structure from motion algorithm based on two-view geometry, dense reconstruction based on new stereo algorithm and 3D mesh extraction. In this work I also describe linear method for calibrating cameras only from input image (self-calibration). Experimental method for lens radial distortion detection based on two-view geometry is also presented here.
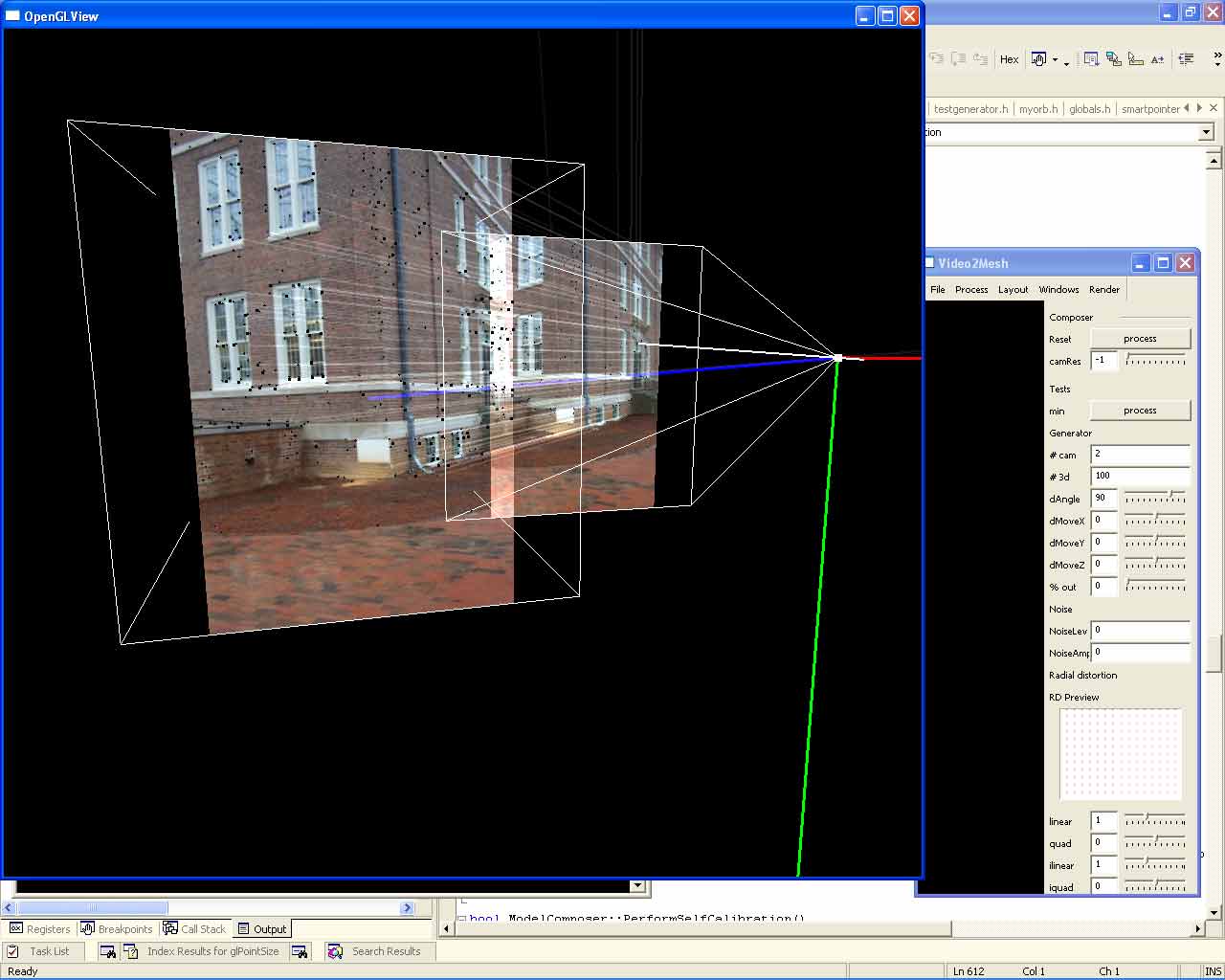
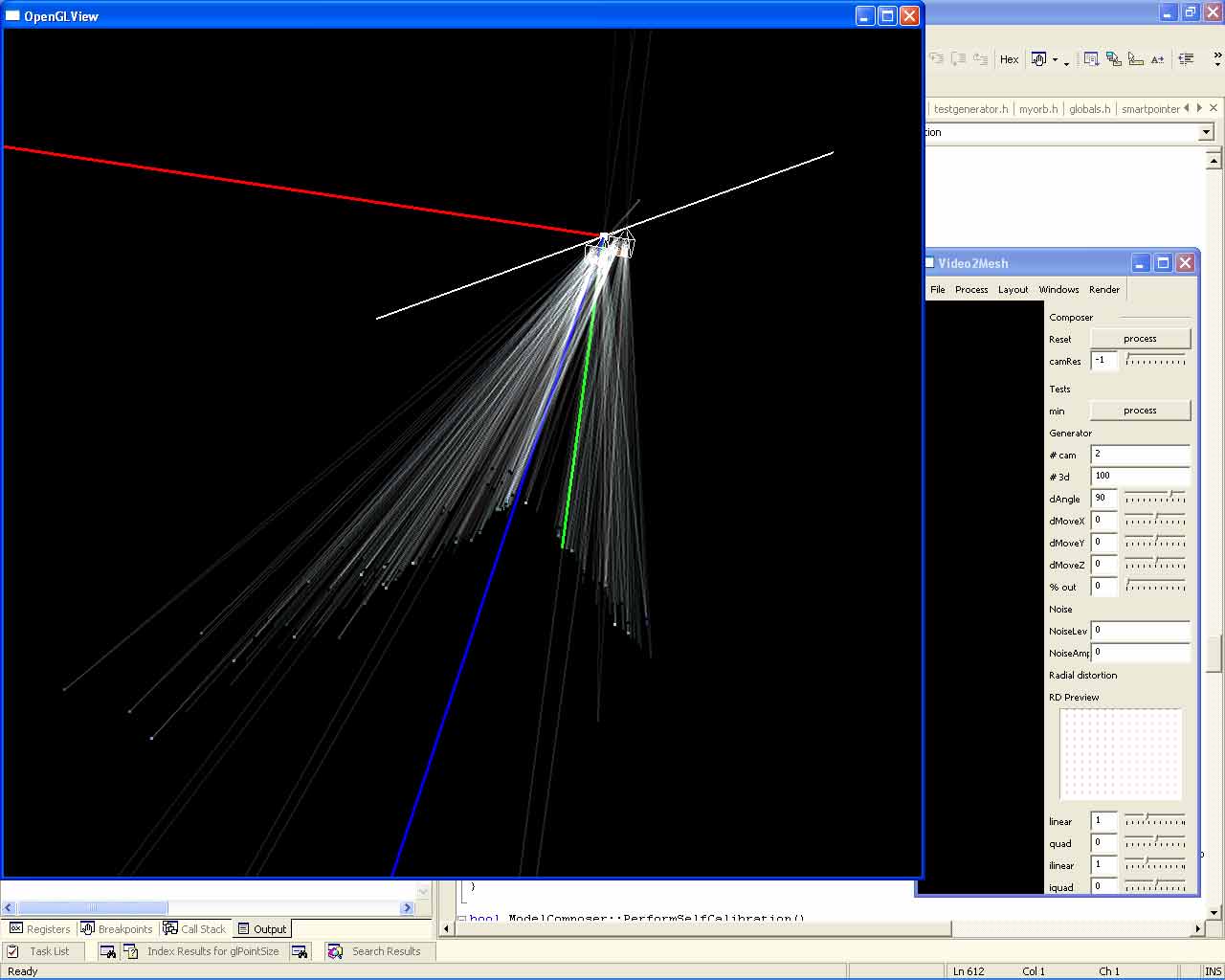
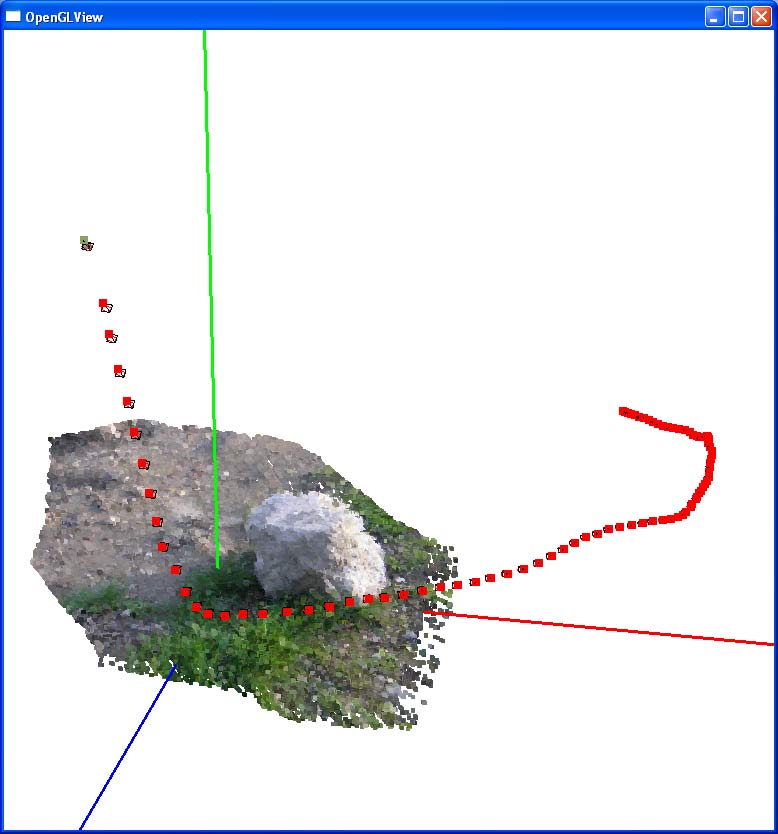
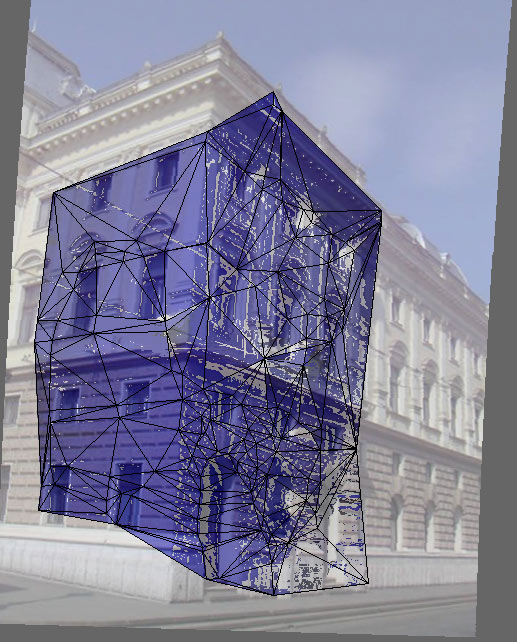
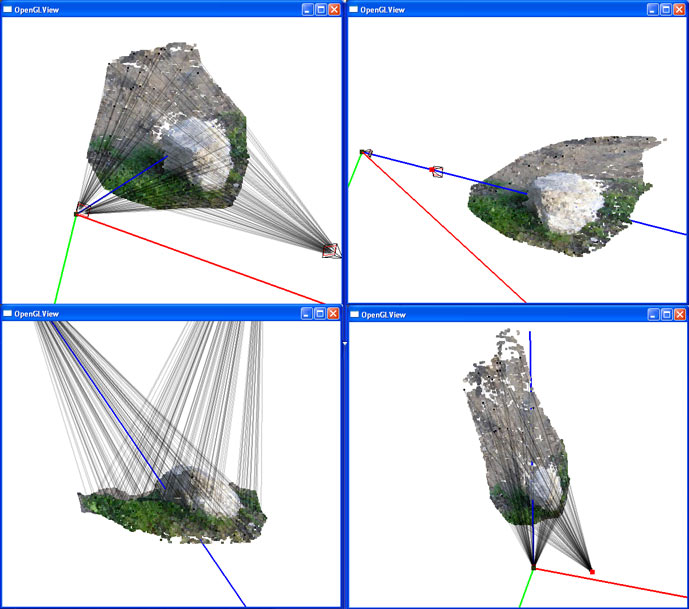
Achieved results
Conclusion and future work
This thesis presented a sequential approach for creating calibrated motion and
structure from un-calibrated video sequence with dense 3D reconstruction of
the space. Sequential processing allows us to process input video directly
from camera stream. Biggest advantage of processing from stream is that we can
skip process of storing to disk and v?ideo compression which leads to better
quality (due to uncompressed transfer).
Because there is always a noise in the images it is not good to calculate
camera position from only two views. Therefore in future it would be better to
improve camera projection matrix calculation, using more images, maybe using
factorization approach. My experiences with real camera also showed that if
principal point is not in image centre, than scene stay skewed even after
self-calibration. For cheap hand held cameras it is unexpected to have
principal point at image center. Allowing principal point to be constant (non
zero) or to be varying leads to non-linear self-calibration algorithm
[4].
Since there are always many ambiguities in dense reconstruction process I
recommend using algorithm where user can control algorithm pipeline. This is
possible and effective when algorithm responds to user interaction promptly.
Slowest part in my reconstruction pipeline is algorithm for dense
reconstruction. Because it works in rectified space, more scan lines can be
processed parallel and thus it is possible to drop down response time.
More work need to be done also in process of triangulation. It would be better
to extract dense point cloud and generate surface using point cloud
approximation algorithms.
|
Bibliography:
-
M. Pollefeys - L. Van Gool - M. Vergauwen - F. Verbiest - K. Cornelis - J.
Tops - R. Koch. Visual modeling with a hand-held camera,
International Journal of Computer Vision 59(3),
207-232, 2004.
-
M. Han - T. Kanade. Creating 3D Models with Uncalibrated Cameras, proceeding
of IEEE Computer Society Workshop on the Application of Computer Vision
(WACV2000), December 2000.
-
P. Sturm - B. Triggs. A Factorization Based Algorithm for
Multi-Image Projective Structure and Motion, 4th European Conference on
Computer Vision, Cambridge, England, April 1996, pp. 709-720 .
-
R. Hartley - A. Zisserman. Multiple View Geometry In Computer
Vision. Second Edition. Cambridge University press, UK. March 2004.
-
A. W. Fitzgibbon -- A. Zisserman. Automatic Camera Tracking.
Robotics Research Group. Department of Engineering Science. University
of Oxford, UK.
-
S. Birchfileld. KLT: An Implementation of the
Kanade-Lucas-Tomasi Feature Tracker. Stanford University,
http://vision.stanford.edu/~birch
-
C. Harris - M. Stephens. A combined corner and edge detector, Fourth Alvey
Vision Conference pp.147-151, 1988.
-
M. Fischler -- R. Bolles. Random Sample Consensus: A Paradigm for Model
Fitting. Communications of the ACM, 24 (6), 381-395. 1981.
-
R. Hartley, In defense of the eight-point algorithm. IEEE
Trans. On Pattern Analysis and Machine Intelligence, 19(6):580-593,
June 1997.
-
A. W. Fitzgibbon. Simultaneous linear estimation of multiple
view geometry and lens distortion. Department of Engineering Science.
University of Oxford, UK.
-
W. Press -- S. Teukolsky -- W. Vetterling. Numerical recipes
in C : the art of scientific computing, Cambridge university press,
1992
-
B. Triggs -- P. McLauchlan -- R. Hartley -- A. Fitzgibbon. Bundle Adjustment -
Modern Synthesis, Vision Algorithms: Theory and
Practice, Springer Verlag, 298-375, 2000.
-
M. I. A. Lourakis - A. A. Argyros. The Design and
Implementation of a Generic Sparse Bundle Adjustment Software Package Based on
the Levenberg-Marquardt Algorithm, Institute of Computer Science --
FORTH, Heraklion, Crete, Greece, August 2004.
-
B. Triggs. The absolute Quadric, Proc. 1997 Conference on
Computer Vision and Pattern Recognition, IEEE Computer Society press,
pp. 609-617, 1997.
-
M. Pollefeys -- R. Koch -- L. V. Gool. Self-Calibration and Metric
Reconstruction in spite of Varying and Unknown Intrinsic Camera Parameters,
International Journal of Computer Vision, KLuwer
Academic Publishers, Boston, 1998
-
P. Breadsley -- A. Zisserman -- D. Murray. Sequential Updating of Projective
and Affine Structure from Motion. International Journal of
Computer Vision (23), No. 3, Jun-Jul 1997, pp. 235-259.
-
M. Pollefeys. 3D Photography, comp290-89 Fall,
University of North Carolina, 2004.
-
V. Kvasnička -- J. Pospíchal -- P.Tiňo.
Evolučné algoritmy. Slovak technical
university, Bratislava, 2000
-
K. N. Kutulakos - S. M. Seitz, A Theory of Shape by Space
Carving, Proc. Seventh Int'l Conf. Computer Vision,
vol. 1, pp. 307-314, 1999.
-
V. Kolmogorov - R. Zabih. Multi-Camera Scene Reconstruction via Graph
Cuts, Proc. Seventh European Conf. Computer Vision,
2002.
-
G. Zeng - S. Paris - L. Quan - M. Lhuillier. Surface
Reconstruction by Propagating 3D Stereo Data in Multiple 2D Images,
Dep. of Computer Science, HKUST, Clear Water Bay, Kowloon, Hong Kong
-
M. Lhuillier - L. Quan. A Quasi-Dense Approach to Surface Reconstruction from
Uncalibrated Images, IEEE Trans. On Pattern Analysis and
Machine Intelligence, VOL. 27, NO. 3, MARCH 2005
-
I. Cox - S. Hingorani - S. Rao. A Maximum Likelihood Stereo Algorithm,
Computer Vision and Image Understanding, Vol. 63, No.
3., 1996
-
S. Birchfield - C. Tomasi, Depth Discontinuities by Pixel-to-Pixel Stereo,
International Journal of Computer Vision, 35(3):
269-293, December 1999
-
S. M. Seitz - C. R. Dyer. Photorealistic Scene Reconstruction by Voxel
Coloring. International Journal of Computer Vision,
35(2), 151-173. 1999
-
Culbertson - W. B., T. Malzbender - G. Slabaugh: 1999, `Generalized Voxel
Coloring. In: Workshop on Vision Algorithms: Theory and
Practice. Corfu, Greece.
-
M. Okutomi - T. Kanade. A multiple baseline stereo. IEEE
Trans. On Pattern Analysis and Machine Intelligence, 15, 1993.
-
C. Strecha, R. Fransens, L. Van Gool - Wide-baseline Stereo
from Multiple Views : a Probabilistic Account, ESAT-PSI, University of
Leuven, Belgium
-
C. R. Dyer. Volumetric scene reconstruction from multiple
views, FIU01, 2001, 469-489
|
|
© 2005 Martin Bujnak. All rights reserved.
|