
|
|
|
| |
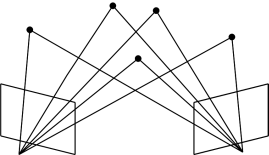
| 5-pt relative pose problem |
| |
| Problem: |
Estimating relative pose of two fully-calibrated cameras from five image point correspondences.
|
| |
| Publications: |
- D. Batra, B. Nabbe, M. Hebert, An alternative formulation for five point relative pose problem. IEEE Workshop on Motion and Video Computing, 2007. [pdf | http]
- E. Kruppa, Zur Ermittlung eines Objektes aus zwei Perspektiven mit Innerer Orientierung,
Sitz.-Ber. Akad.Wiss.,Wien, Math. Naturw. Kl., Abt. IIa., 122:1939-1948,
1918.
- Z. Kukelova, M. Bujnak, T. Pajdla, Automatic Generator of Minimal Problem Solvers, ECCV 2008, (to appear). [pdf | http | code]
- Z. Kukelova, M. Bujnak, T. Pajdla, Polynomial eigenvalue solutions to the 5-pt and 6-pt relative pose problems, BMVC 2008, (to appear) [pdf | http | code]
- H. Li and R. Hartley. Five-point motion estimation made easy. ICPR 2006, pp.
630–633.[pdf | http | code]
- D. Nister. An efficient solution to the five-point relative pose problem. IEEE PAMI, 26(6):756–770, 2004. [pdf | http | code]
- J. Philip. A Non-Iterative Algorithm for Determining all Essential Matrices Corresponding to Five Point Pairs Photogrammetric Record, 15(88):589-599, 1996.[http]
- H. Stewenius, C. Engels, and D. Nister. Recent developments on direct relative orientation. ISPRS J. of Photogrammetry and Remote Sensing, 60:284–294, 2006.
[pdf | http | code]
|
| Code: |
- Stewenius' Groebner basis solver [8] (Matlab+mex) [link]
- Nister's solver [6] (Matlab) [link]
- Li's Hidden variable solver [5] (Matlab) [source code]
- Greobner basis solver generated using Automatic generator [3] (Matlab) [source code]
- Greobner basis solver generated using Automatic generator [3] (C) [source code]
- Polynomial eigenvalue solution [4] (Matlab) [source code]
|
| Evaluation: |
|
|