| veličina | hodnota | jednotky |
| Vnější napájecí napětí skříně | 230ą10% | VAC |
| Trvalý výkon vstupního transformátoru | 150 | W |
| Napájecí napětí elekroniky | 24 (12 až 34) | VDC |
| Max. přípustný proud jedním motorem | 5 | A |
| - nadproudová ochrana | lokální elektronická pro každou osu+ měření a vyhodnocení proudu mikroprocesorem | |
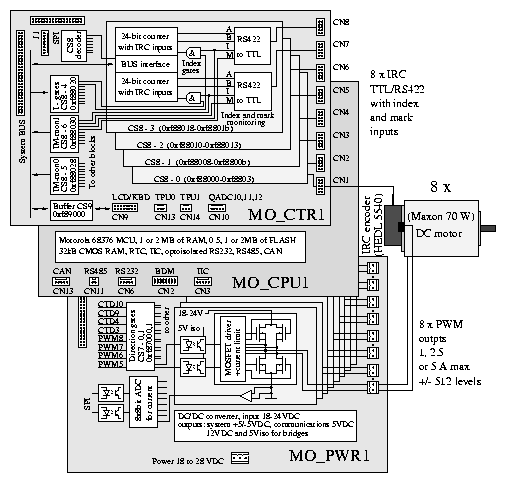
| Vstup snímače polohy (IRC) | 2 fázově posunuté signály + index + limit úrovně TTL nebo RS-422 | |
| Max. frekvence IRC signálů | 2 | MHz |
| Vstupy snímačů joysticku | 0 až 5 | V |
| - předpokládaná centrální poloha | 2.5 | V |
| - citlivost vstupů joysticku | rozsah lze upravit pro konkrétní joystick odpory | |
| Jemné doladění citlivosti a nulové polohy joysticku | softwarově | |
| Generátor požadované polohy | lichoběžníkový průběh s nastavitelným zrychlením a maximální rychlostí | |
| konstantní rychlost s rozběhem a bržděním | ||
| Regulace polohy motorů | vlečný PID regulátor s nelinearním tlumením | |
| Nastavování P, I a D konstant | softwarově | |
| Rozsah polohy motoru | ą8000.000 | po 0.001 |
| - rozsah v periodách IRC signálu (4 fáze) | 4000000 | |
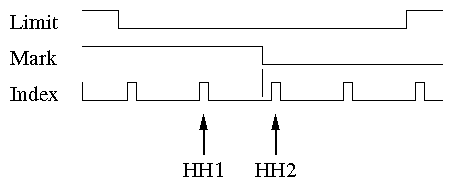
| Kalibrace absolutní polohy | automatické vyhledání volitelné kombinace koncových spínačů a indexu | |
| Jméno | Op | Parametry | Funkce |
| Gm | : | xxx.xxx | Najetí na absolutní polohu |
| -8000,8000.000 |
| Jméno | Op | Parametry | Funkce |
| GRm | : | xxx.xxx | Najetí na relativní polohu |
| -8000,8000.000 |
| Jméno | Op | Parametry | Funkce |
| APm | ? | Aktuální poloha | |
| Jméno | Op | Parametry | Funkce |
| HHm | : | Referenční poloha 'm' |
| Jméno | Op | Parametry | Funkce |
| SETAPm | : | xxx.xxx | Nastaví odečet polohy 'm' |
| -8000,8000.000 |
| Jméno | Op | Parametry | Funkce |
| COORDGRP | : | m1,m2,... | Výběr motorů pro koordinovaný pohyb |
| A..H |
| Jméno | Op | Parametry | Funkce |
| COORDMV | : | xxx,xxx,... | Koordinovaný pohyb v motorových souřadnicích |
| -8000,8000.000,... |
| Jméno | Op | Parametry | Funkce |
| COORDMVT | : | tttt,xxx,xxx,... | Koordinovaný pohyb s časováním |
| 0,10000000 | |||
| -8000,8000.000,... |
| Jméno | Op | Parametry | Funkce |
| REGPm | : ? | xxx | Proporcionální kon. pro 'm' |
| 0,255 | |||
| REGIm | : ? | xxx | Integrační konstanta pro 'm' |
| 0,255 | |||
| REGDm | : ? | xxx | Derivační konstanta pro 'm' |
| 0,255 | |||
| REGS1m | : ? | xxx | 1. pomocná konstanta 'm' |
| 0,255 | |||
| REGS2m | : ? | xxx | 2. pomocná konstanta 'm' |
| 0,255 |
| Jméno | Op | Parametry | Funkce |
| REGMSm | : ? | xxx | Maximální rychlost pro 'm' |
| 0,30000 |
| Jméno | Op | Parametry | Funkce |
| REGACCm | ? | xxx | Zrychlení pro motor 'm' |
| 0,30000 |
| Jméno | Op | Parametry | Funkce |
| REGMEm | : ? | xxx | Maximální PWM pro 'm' |
| 0,30000 |
| Jméno | Op | Parametry | Funkce |
| REGMDm | : ? | xxx | Maximální povolená regulační odchylka pro 'm' |
| 0,30000 |
| Jméno | Op | Parametry | Funkce |
| REGCFGm | : ? | xxx | Konfigurační slovo pro 'm' |
| 0,30000 |
| Jméno | Op | Parametry | Funkce |
| REGSFRQ | : ? | x | Vzorkovací frekvence regulátorů |
| *opt | 200,2500 |
| Jméno | Op | Parametry | Funkce |
| REGDBGm | : | x | Povolení sledování 'm' |
| 0,1 |
| Jméno | Op | Parametry | Funkce |
| REGDBGHIS | : | xxxx | Vyčtení historie pohybu |
| 0,3000 |
| Jméno | Op | Parametry | Funkce |
| REGDBGPRE | : | xxxx | Příprava dat pro sledování odezvy |
| 0,3000 |
| Jméno | Op | Parametry | Funkce |
| REGDBGGNR | : | odezva regulace motoru |
| Jméno | Op | Parametry | Funkce |
| CLEARm | : | Vypnutí řízení a nulování 'm' | |
| CLEAR | : | Vypnutí řízení a nulování všech motorů |
| Jméno | Op | Parametry | Funkce |
| STOPm | : | Zastavení pohybu motoru 'm' | |
| STOP | : | Zastavení pohybu všech motorů |
| Jméno | Op | Parametry | Funkce |
| PURGE | : | Zastaví regulace s chybou |
| Jméno | Op | Parametry | Funkce |
| RELEASEm | : | Odpojí regulátor a zastaví 'm' | |
| RELEASE | : | Odpojí regulaci a zastaví všechny motory |
| Jméno | Op | Parametry | Funkce |
| R | : | Ohlas ukončení jen jednou |
| Jméno | Op | Parametry | Funkce |
| Rm | : | Ohlas pro jednotlivý motor |
| Jméno | Op | Parametry | Funkce |
| STm | ? | Status motoru 'm' |
| Bit | Význam |
| 0 | Povolen odečet IRC |
| 1 | Povolen regulátor |
| 2 | Povolen generátor |
| 3 | Chyba |
| 4 | Probíhá minulý příkaz |
| 5 | Zapnuto ukládání průběhu regulace |
| 6 | Probíhá koordinovaný pohyb |
| 7 | Fronta požadavků dosáhla hranice zaplnění |
| 16 | Vypnuté výkonové napájení |
| 17 | Vypnuto tlačítkem power stop |
| Jméno | Op | Parametry | Funkce |
| ST | ? | Status všech motorů |
| Jméno | Op | Parametry | Funkce |
| STBSYBITS | ? | Informace o probíhajících operací |
| Jméno | Op | Parametry | Funkce |
| SPDm | : | xxx | Točit zadanou rychlostí |
| *opt | -32000,32000 |
| Jméno | Op | Parametry | Funkce |
| SPDTm | : | xxx,yyy | Točit rychlostí 'xxx' po max dobu 'yyy' |
| *opt | -32000,32000 | ||
| 0,32000 |
| Jméno | Op | Parametry | Funkce |
| PWMm | : | xxx | Přímé nastavení PWM |
| *opt | -32000,32000 |
| Jméno | Op | Parametry | Funkce |
| DIGO | : | xxxxx | Nastavení digitálních výstupů |
| DIGOn | : | xxxxx | Rozšířené nastavení výstupů |
| *opt | 0,65535 |
| Jméno | Op | Parametry | Funkce |
| DIGI | ? | Čtení stavu digitálních vstupů | |
| DIGIn | ? | Rozšířené čtení vstupů | |
| *opt |
| Jméno | Op | Parametry | Funkce |
| DIGM | : | mask, xor | Modifikace stavu digitálních výstupů |
| DIGMn | : | mask, xor | Rozšířená modifikace stavu nastavení výstupů |
| *opt | 0,65535, 0,65535 |
| Jméno | Op | Parametry | Funkce |
| TRIGt | : | s,m,do | Nastavení triggeru |
| TRIG | : | s,m,n,mask,xor | |
| *opt |
| Jméno | Op | Parametry | Funkce |
| CMPc | : | f,m,p,do | Komparátory polohy |
| CMPc | : | f,m,p,n,mask,xor | |
| *opt |
| Jméno | Op | Parametry | Funkce |
| CMPREPOc | : | poffs | Offset polohy při periodickém spouštění komparátoru |
| *opt, ver 2.1 |
| Jméno | Op | Parametry | Funkce |
| ADCa | ? | Čtení analogového vstupu | |
| *opt |
| Jméno | Op | Parametry | Funkce |
| VER | ? | Vrací verzi software |
| Jméno | Op | Parametry | Funkce |
| STAMP | : | ssss | Synchronizační značka pro komunikaci |
| Jméno | Op | Parametry | Funkce |
| ERRSTOP | : ? | x | Zastavování všech pohybů při chybě |
| 0,1 |
| Jméno | Op | Parametry | Funkce |
| IDLEREL | : ? | xxx | Vypínání regulátorů při nečinnosti |
| 0,4000000 |
| Jméno | Op | Parametry | Funkce |
| REGGOFLG | : ? | x | Příznak pro modifikaci příkazu Gm |
| 0,1 |
| Jméno | Op | Parametry | Funkce |
| ECHO | : ? | x | Znakové echo pro znaky z RS232 |
| 0,1 |
| Jméno | Op | Parametry | Funkce |
| RS232BAUD | : | xxx | Změna přenosové rychlosti |
| 1200,38400 |
| Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Příznaky | x | x | x | x | x | M | x | T | P | L | C | R | D | S | S | S |
| Příznaky | Význam |
| SSS | rychlost hledaní dorazu při HH bude REGMSm / 2SSS |
| D | počáteční směr hledání dorazu při HH |
| R | používá se značka otáčky z HP HEDS pro nalezení HH |
| C | hledat střed značky |
| L | používá se limitní switch |
| P | polarita limitního spínače |
| T | používat lichoběžníkový profil rychlosti |
| M | chyba při odchylce polohy větší než REGMDm |
| LCR=111 | jen hledání značky |
| CR=11 | hledaní pouze středu značky |
| Hodnota | Význam |
| 0 | hledat jen koncový vypínač motoru |
| 16 | najít první značku otáčky od koncového vypínače |
| 32 | hledat střed první značky od koncového vypínače |
| 48 | hledat střed značky |
| 64 | hledat jen limitní spínač |
| 80 | najít první značku otáčky od limitního spínače |
| 96 | hledat střed první značky od limitního spínače |
| 112 | pouze hledat značku |
| TRIGt:s,m,do | ||
| TRIGt:s,m,n,mask,xor | ||
| t .. | číslo triggeru 0 až 3 | |
| s .. | zdroj triggeru 0 až 15 ( -1 odpojení triggeru ) | |
| s.0 .. s.3 .. | číslo zdroje | |
| s.4 .. | náběžná hrana | |
| s.5 .. | sestupná hrana | |
| s.6 .. | vyslat stav na vstupech | |
| s.7 .. | nastavit digitální výstupy | |
| s.8 .. | filtr zákmitů | |
| m .. | maska motorů, které se mají zastavit a vyslat polohu | |
| m.0 .. | zastavit A | |
| m.1 .. | zastavit B | |
| ... | ||
| m.7 .. | zastavit H | |
| m.8 .. | vysílat A | |
| m.9 .. | vysílat B | |
| m.15 .. | vysílat H | |
| do .. | hodnota na digitální výstupy při triggeru | |
| n .. | číslo skupiny výstupů | |
| mask .. | maska nastavovaných bitů | |
| xor .. | požadovaná hodnota maskovaných bitů | |
| pro bity neuvedené v masce dojde ke změně výstupu | ||
| TGt!di,ma,mb,mc | |
| t .. | číslo triggeru 0 nebo 1 |
| di .. | co bylo na vstupech v době triggeru, není-li vysílání povoleno, vyšle "N" |
| ma,mb,mc .. | podle volby m v nastavení vysílá polohu IRC |
| CMPc:f,m,p,do | ||
| CMPc:f,m,p,n,mask,xor | ||
| c .. | číslo komparátoru 0 až 3 | |
| f .. | příznaky akce ( 0 vypnutí komparátoru ) | |
| f.0 .. | čekat na APm p | |
| f.1 .. | čekat na APm p | |
| f.2 .. | zatím nevyužito | |
| f.3 .. | pozastavit další komparátory, do události na tomto komparátoru | |
| f.4 .. | nastavit digitální výstupy | |
| f.5 .. | comparátor je spouštěn opakovaně s přírůstkem CMPREPOc | |
| m .. | písmeno komparovaného motoru | |
| p .. | komparovaná poloha ( přepočty a rozsah shodný APm a Gm ) | |
| do .. | hodnota na digitální výstupy při události na komparátoru | |
| n .. | číslo skupiny výstupů | |
| mask .. | maska nastavovaných bitů | |
| xor .. | požadovaná hodnota maskovaných bitů | |
| CMPc!di | |
| c .. | číslo komparátoru 0 až 3 |
| di .. | co bylo na vstupech, není-li vysílání povoleno, vyšle "N" |
| Jméno | Op | Parametry | Funkce |
| REGPWRON | : | x | Povolení zapnutí napájení |
| 0,1 |
| Jméno | Op | Parametry | Funkce |
| REGPWRFLG | : | xxx | Příznaky pro řízení výkonových výstupů |
| 0,255 |
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Příznaky | BREAK | LIM | ON |
| Pin | Signál |
| 1 | +24 V Control |
| 2 | +24 V Motor |
| 3 | Power GND |
| Pin | Signál | Alt. TTL vstup | DB9 |
| 1 | VCC | 8,9 | |
| 2 | VSTUP A | I13 | 3 |
| 3 | VSTUP B | I14 | 4 |
| 4 | VSTUP C | I15 | 5 |
| 5 | GND | 1,2 |
| MARS 8 | PC | ||||
| Pin na desce | Signál | DB9 | Signál | DB25 | DB9 |
| 1 | TxD | 2 | RxD | 3 | 2 |
| 2 | RxD | 3 | TxD | 2 | 3 |
| 3 | RTS | 8 | CTS | 5 | 8 |
| 4 | CTS | 7 | RTS | 4 | 7 |
| 5 | GND | 5 | GND | 7 | 5 |
| Signál | Samořezný10-pinů | Delta15-pinů | IRC HPHEDL | IRC HPHEDS |
| Mark Inv | 1 | 1 | - | |
| +5V | 2 | 9 | 2 | 4 |
| GND | 3 | 2 | 3 | 1 |
| Mark | 4 | 10 | - | |
| Fáze A Inv | 5 | 3 | 5 | |
| Fáze A | 6 | 11 | 6 | 3 |
| Fáze B Inv | 7 | 4 | 7 | |
| Fáze B | 8 | 12 | 8 | 5 |
| Index Inv | 9 | 5 | 9 | |
| Index | 10 | 13 | 10 | 2 |
| 6 | ||||
| Motor + | 14,7 | |||
| Motor - | 15,8 |
| Pin | Signál |
| Konektor I1 - CN13 | |
| 1 | VCC |
| 2 | INPUT |
| 3 | GND |
| Konektor I2 - CN14 | |
| 1 | VCC |
| 2 | INPUT |
| 3 | GND |
| Pin | Signál |
| 1 | VCC |
| 2 | GND |
| 3 | SDI |
| 4 | SDO |
| 5 | SCLK |
| 6 | CS1 |
| 7 | CS2 |
| 8 | CS3 |
| Pin | Signál |
| 1 | CAN GND |
| 2 | CAN L |
| 3 | SHIELD |
| 4 | CAN H |
| 5 | CAN VCC |
| Pin | Signál |
| 1 | GND |
| 2 | SCL |
| 3 | VCC |
| 4 | SDA |