
| 
| 
|
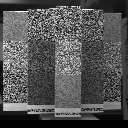
| side view | front view | back view |
|---|

|
|
|
|
| side view | front view | back view |
|---|
The staircase-like target (left) is designed to combine all possible texture contrast changes across left or right occlusion boundary (center) or across no depth change (right). All textures are random binary Gaussian noise of different mean gray-value and contrast. The texture pattern is the same on the target's flat back so that the influence on the matching algorithm of the texture boundaries alone can be studied in a control experiment.
PostScript textures for the three panels are available: front, middle, rear.
| 
|
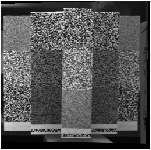
| front: left image | front: right image |
|---|---|
| download: [ GIF, PM, PGM] | download: [ GIF, PM, PGM] |
| 
|
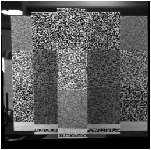
| back: left image | back: right image |
| download: [ GIF, PM, PGM] | download: [ GIF, PM, PGM] |
| 
|
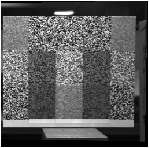
| disparity map (pseudocolors) | left occlusion map |
|---|---|
| download: [ASCII] | download: [ASCII] |
| disparity map |
|---|
| download: [ASCII] |
Both datafiles are plain ASCII files with 256 rows of 256 IEEE-format
double integers. You may download them directly to your Matlab using
load. Ground-truth sub-pixel disparity map pixels are
NaNs where the disparity is not defined (the corresponding matrix
entry is `NaN'). Ground-truth left occlusion map pixels are 1's in
areas that are occluded in the right image and 0's elsewhere. The
disparity and the occlusion maps are not defined on the background
since the background is not considered a part of the ground-truth.
{kind=link}
{kind=link}
{kind=link}
{kind=link}