Rychlé Učitelné Metody pro Sledování Objektů
Karel Zimmermann [cv], supervisors: Jiri Matas Tomas Svoboda,Czech Technical University Prague
http://cmp.felk.cvut.cz/
|
Rychlé Učitelné Metody pro Sledování ObjektůKarel Zimmermann [cv], supervisors: Jiri Matas Tomas Svoboda, |
Center for Machine Perception Czech Technical University Prague http://cmp.felk.cvut.cz/ |
Video
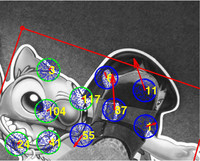
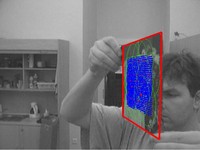
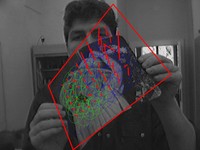
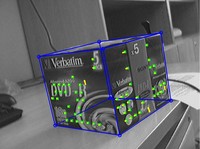
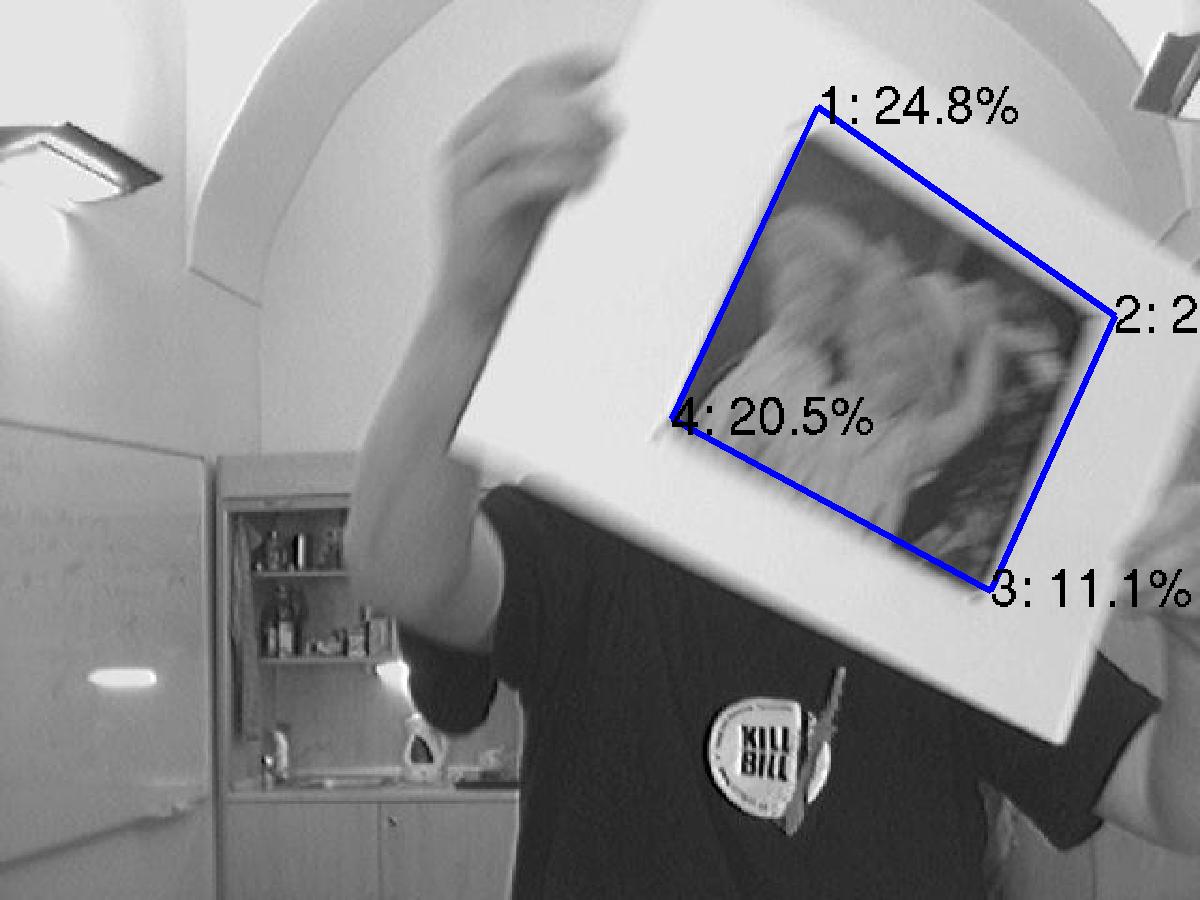
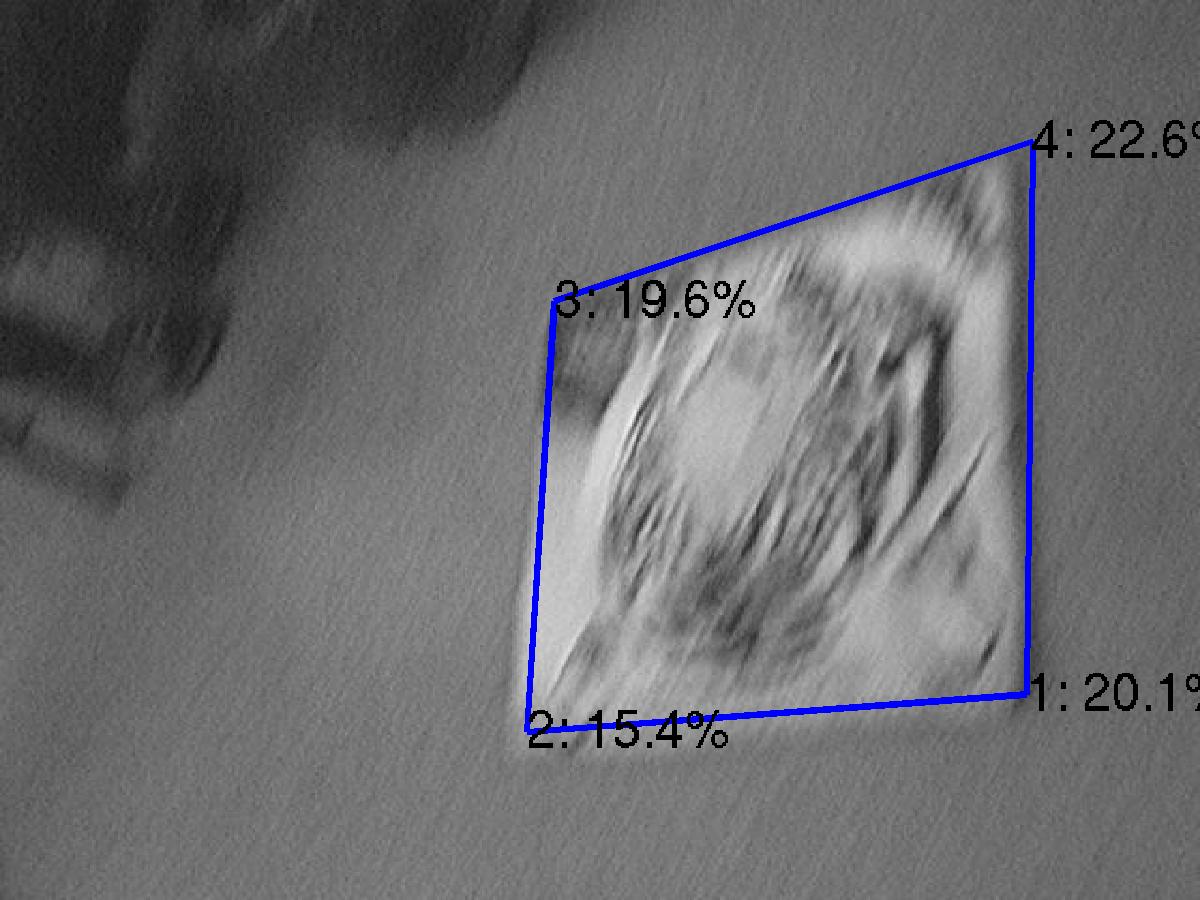
Rychlý pohyb (obrázky)
|
AbstraktTato práce se zabývá problémem vizuálního sledování objektů ve videosekvencích. Vizuální sledování je proces opakovaného odhadu stavu objektu (např. pozice) v obrázku při daných stavech v předcházejících snímcích. Sledování má mnoho aplikací jako jsou automatický vizuální dohled, 3D modelování objektů nebo virtuální realita a mnohé další. Vzhledem k tomu, že mnoho aplikací vyžaduje zpracování v reálném čase, velmi nízká výpočetní složitost je vysoce žádoucí vlastnost. Náš hlavní cíl je nalézt velmi rychlou metodu, která má definovanou přesnost a robustnost. My přispíváme k metodám založeným na regresním odhadu pozice objektu. Na místo toho abychom navrhovali speciální učící proceduru pro speciální typ regresní funkce, navrhujeme optimální zřetězení různých regresních funkcí do sekvence. Vzhledem k tomu, že čas zpracování je při sledování často velmi důležitý, učení sekvence regresních funkcí je formulováno jako minimalizace výpočetní složitosti vzhledem k omezení dané uživatelem definovanou přesností a robustností. Vzhledem k tomu, že je nalezeno globální optimum, řešení je vždy lepší nebo stejně dobré než jedna regresní funkce. Libovolné regresní funkce umožnují takovéto zřetězení, avšak v naší práci se soustředíme na sekvence lineárních funkcí, které dosahují vysoké přesnosti při velmi nízké výpočetní složitosti. V práci se také zabýváme optimálním nastavením metody pro sledování objektů v reálném čase nebo sledováním objektů se známým geometrickým modelem. Navrženou metodu ověřujeme na 12000 snímcích v nichž je pozice objektu známá a výsledky porovnáváme s nejmodernějšími metodami v oboru. References
|