XE383ZS::Lab3
XE383ZS Lab 3 - Geometrical transformations
The main goal of this computer lab is to understand the geometrical
transformation of image spatial coordinates. We concentrate on the
global transformations which means that all coordinates undergo the
same transform. For simplicity we narrow to image rotations.
The secondary goal is to use the Fourier analysis to estimate the
angle of rotation automatically. Modern consumer oriented devices are
often without optical viewfinder and too small to be held firmly during
acquisition. This frequently results in "falling horizon". The image is
softly slanted which is easily correctable by a post-processing.
The process can be split in two parts: geometrical
transformation of spatial coordinates and intensity
interpolation. For details, look at the lecture slides (slides 61-90).
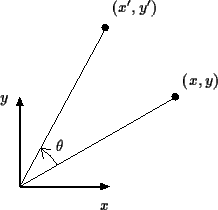
2D Rotation
Rotations of coordinates [x y]' around the origin about
angle θ in positive direction can be written as
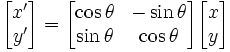
Note that, in Matlab, we can realize the above transform by a matrix
multiplication. If we organize the set of all coordinates in a [2xN]
matrix the result will be again [2xN] matrix of transformed
coordinates. It is much faster than to loop over all coordinates. The
code is more readable, too.
| |
|
Interpolation
You can implement your own, option nearest neighbour is
fairly straightforward, optinally you may employ the Matlab function
interp2.
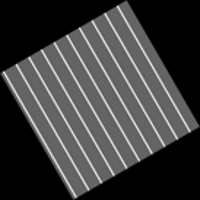
Automatic estimation of the rotation
There is hardly a method that would work for any
image. However, if we assume that the image contains relevant strong
edges in particular direction we design a simple approach based on an
analysis of the Fourier spectra. For this, we employ the radon
transform, see the Matlab function radon.
 |
 |
 |
 |
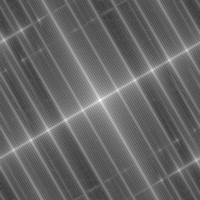
| input image |
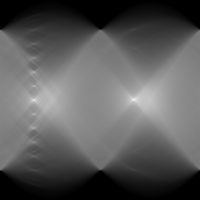
log(im_Pfft) |
Radon transform |
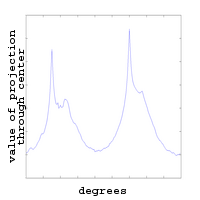
projections through
the image center |
Radon transform
The graphical Matlab help, doc radon, provides the
necessary explanation we need. We will not go into theoretical details
of the transform.
Assignment
We recommend to start working on it already during the lab.
[ Responsible:
Tomáš Svoboda
| XE383ZS labs
]
Last modified at 17:06, 18 April 2008 CEST.