| 33IRO Inteligentní robotika 2005 | |||||
| Přednášející: | Tomáš Pajdla | Rozsah: | 2 + 2 | Obor: | TK |
| Cvičící: | Hynek Bakstein, Michal Havlena | Kredity: | 4 | Dop. semestr: | 11 |
| Katedra: | K333 | Zakončení: | z, zk | Typ předmětu: | Pov. vol. |
| Přednáška: | 09:15 - 11:00 v K9 | Cvičení: | Pondělí 12:45-14:15, 14:30-16:00, K132 | ||
| Rozvrh (aktuálně na http://cyber.felk.cvut.cz/teaching/) | Seznam studentů | ||
| Výsledky a hodnocení | Kontakt | iro2005@cmp.felk.cvut.cz | |
| Odevzdání (a zadání) domácích úloh |
| ,,Drahá slečno Gloryová, Roboti nejsou lidé. Jsou mechanicky dokonalejší než my, mají úžasnou rozumovou inteligenci, ale nemají duši. Ó, slečno Gloryová, výrobek inženýra je technicky vytříbenější než výrobek přírody." (Karel Čapek, R.U.R.) | ||
| V předmětu IRO 2005 se naučíme, jak lze vyřešit inverzní kinematickou úlohu pro obecný manipulátor se šesti stupni volnosti. Obecné řešení tohoto problému existuje, ale není snadné ho získat elementárními metodami. Je třeba použít některé hlubší výsledky z algebry, se kterými se běžně nesetkáváme. Jsou však velmi užitečné, neboť se ukáže, že nám dovolí řešit soustavy algebraických rovnic mechanickým postupem, který lze naprogramovat. |
Program přednášek (= otázky ke zkoušce)
| 1. | 03.10 | Úvod, inverzní kinematická úloha, přednáška, cvičení, test-alpha [slidy] |
| 2. | 10.10 | Afinní a Eukleidovský prostor, souřadná soustava, souřadnice bodu, vzdálenost, úhel, pravotočivá báze, orientace čtveřice bodů, pohyb je stejnolehlost, stejnolehlost je transformací souřadnic bodu v pevné souřadné soustavě [slidy] |
| 3. | 17.10 | Pohyb jako transformace souřadnic, chrakterizace pohybů (rotace a translace) [slidy] |
| 24.10 | Školení bezpečnosti | |
| 4. | 31.10 | Kinematika sériového manipulárotu - Denavit-Hartenberg konvence krok za krokem [slidy] |
| 5. | 07.11 | Osa pohybu, šroubový pohyb [slidy] |
| 6. | 14.11 | Soustava algebraických rovnic, polynomy, afinní varieta, ideál [slidy] |
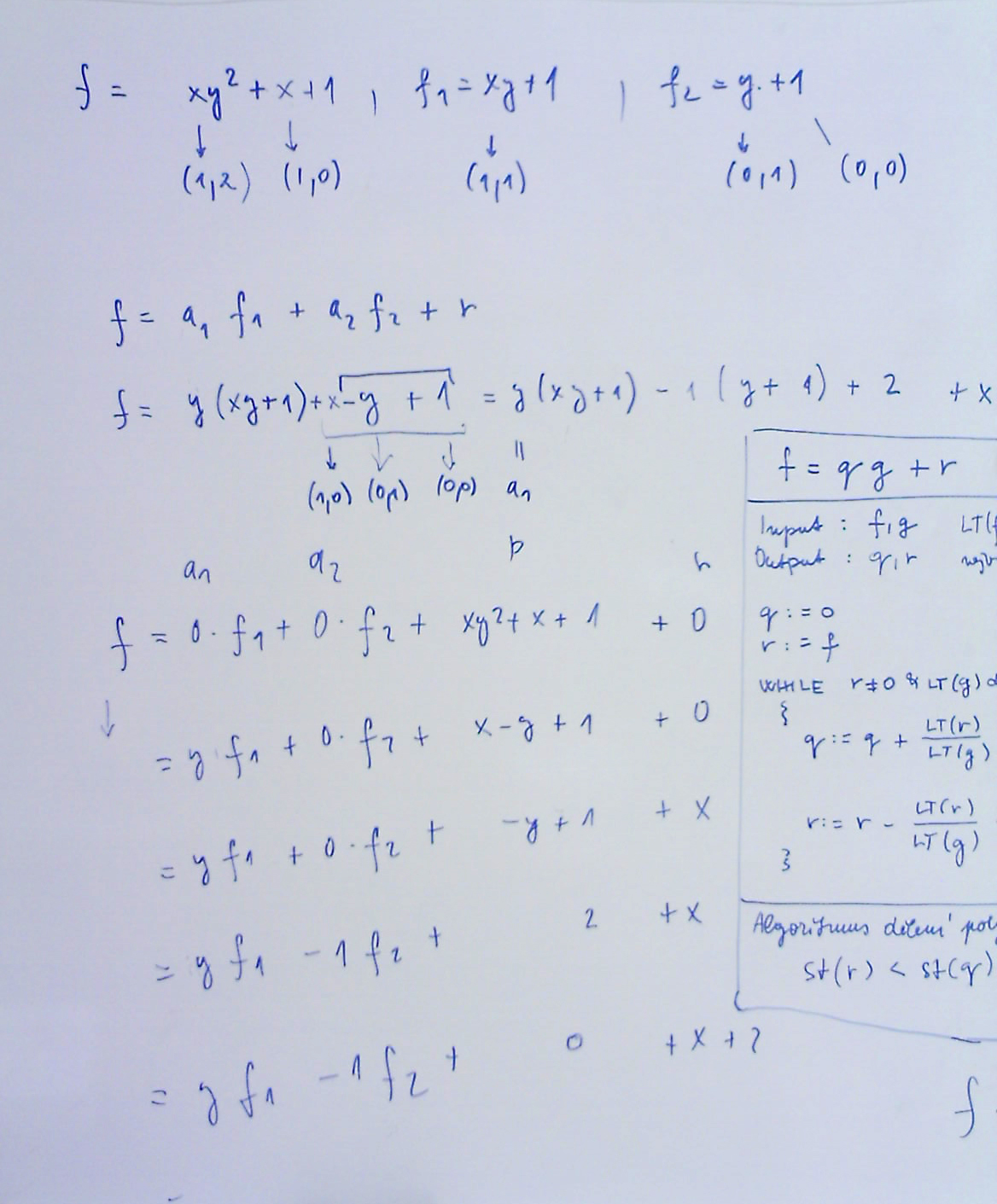
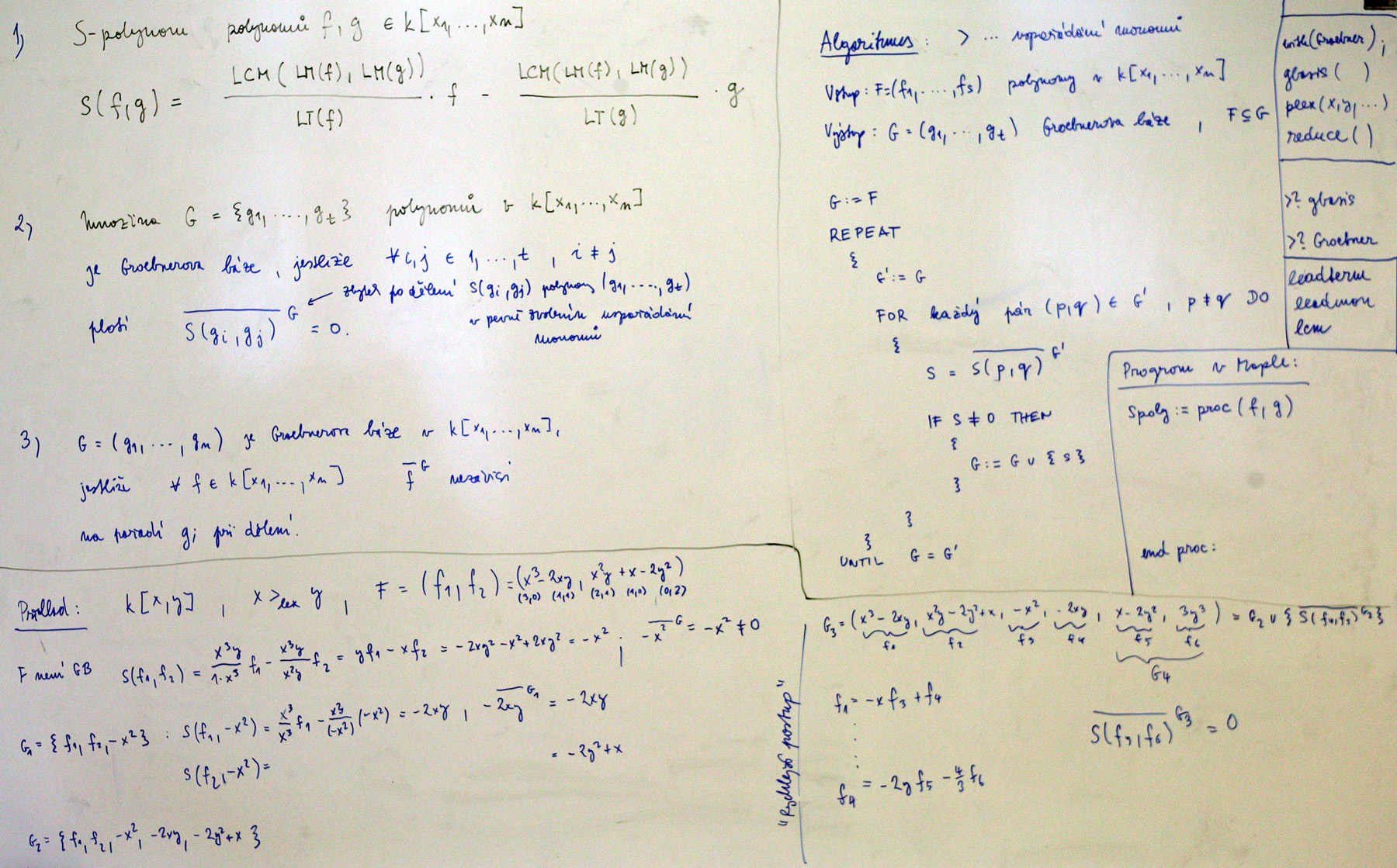
| 7. | 21.11 | Dělení polynomů, uspořádání monómů, Groebnerova báze [slidy] |
| 8. | 28.11 | Řešení soustav algebraických rovnic pomocí Groebnerovy báze - postup [slidy] |
| 9. | 05.12 | Řešení soustav algebraických rovnic pomocí Groebnerovy báze - důkazy [slidy] |
| 10. | 12.12 | IKU - Manocha & Canny 2004 |
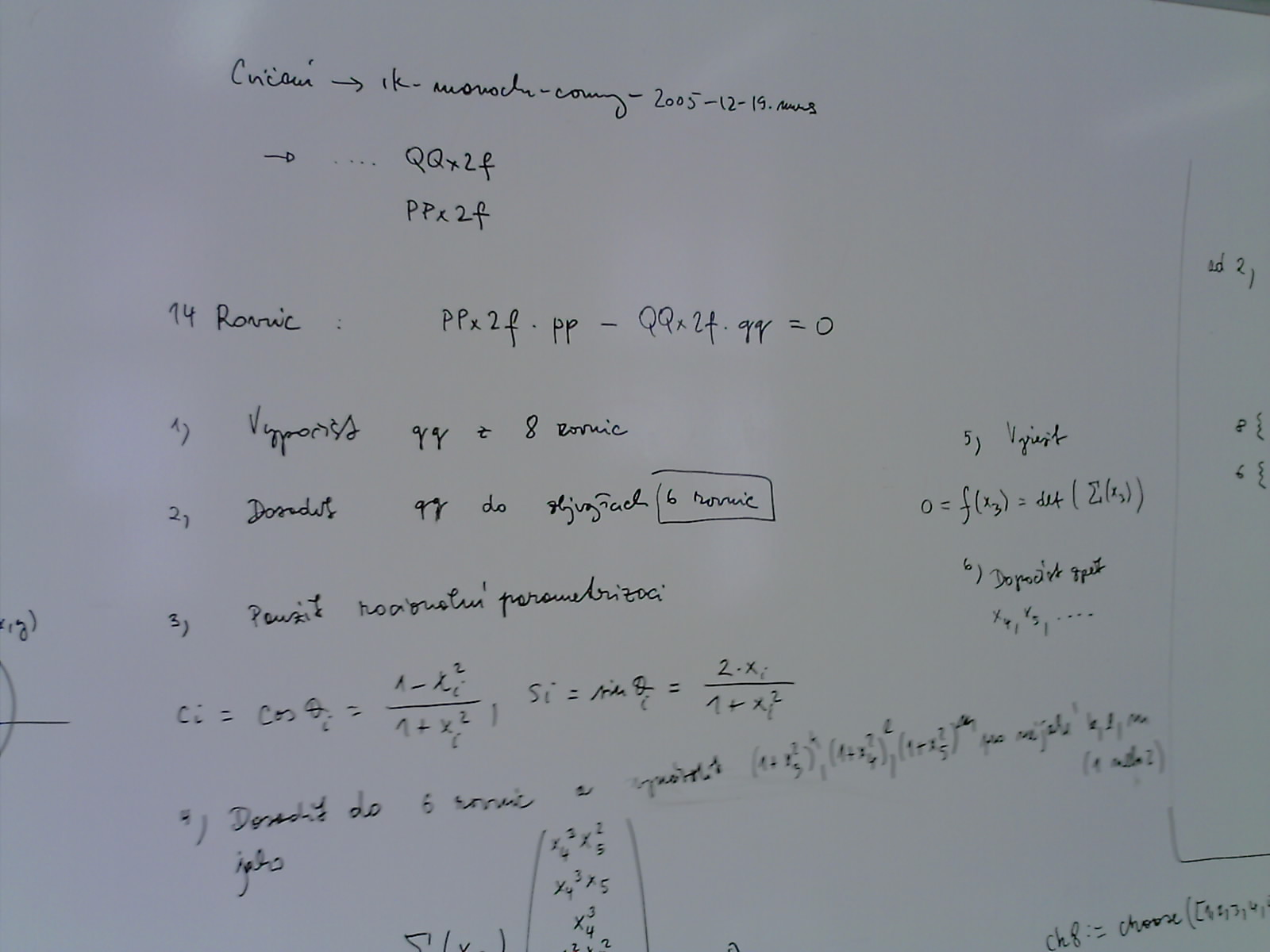
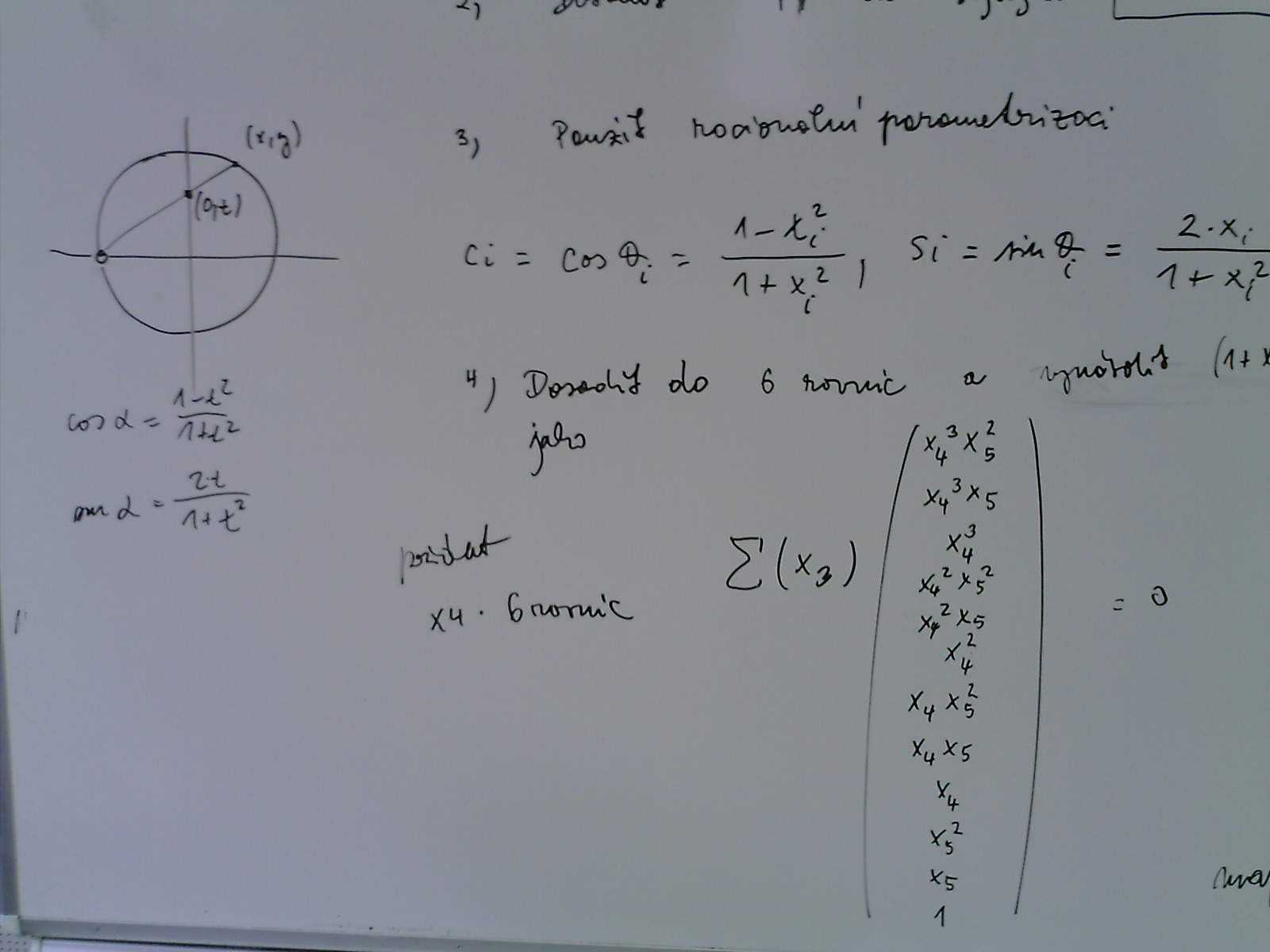
| 11. | 19.12 | IKU - Manocha & Canny 2004 |
| 12. | 09.01 | IKU - Manocha & Canny 2004, Přehled zkoušených témat |
Program cvičení
| Náplň | Test | Domácí úkol | ||
| 1. | 03.10 | Lineární prostor, vlastní čísla |
alpha |
DU-01: Alg. rovnice a vlastní č. |
| 2. | 10.10 | DH-Konvence, Staubli TX-90 | DU-02: DH-kinematika | |
| 3. | 17.10 | DH-konvence & elementární IKU | DU-03: Elementární IKU | |
| 4. | 24.10 | Naivní metoda řešení IKU pro 2 osy pohybu v Maple | DU-04: IK: 2 + formulace 3 os | |
| 5. | 31.10 | Naivní metoda řešení IKU pro 3 osy pohybu v Maple | DU-05: IK: 3 osy, 1.cast | |
| 6. | 07.11 | Naivní metoda řešení IKU pro 3 osy pohybu v Maple | DU-06: IK: 3 osy, 2. cast | |
| 7. | 14.11 | Dělení polynomů - více dělitelů a proměnných, Tabule [1, 2] | DU-07: Dělení polynomů | |
| 8. | 21.11 |
Groebnerova báze, Tabule [1] |
DU-08: Groebnerova báze | |
| 9. | 28.11 | Řešení alg. rovnic pomocí Groebnerovy báze | DU-09: Soustava alg. rovnic | |
| 10. | 05.12 | Řešení alg. rovnic pomocí Groebnerovy báze | TEST | DU-10: Řešení a.r. pomoci GB |
| 11. | 12.12 | ik-manocha-canny-2005-12-12.mws, clanek M&C-1994 | DU-11 IK Manocha & Canny | |
| 12. | 19.12 | ik-manocha-canny-2005-12-19.mws,Tabule [1, 2, 3] | DU-12 IK Manocha & Canny | |
| 13. | 09.01 | TEST |
Testy
Pravidla pro cvičení, zápočet a zkoušku
Zápočet je udělěn po dosažení alespoň 20 bodů z domácích úkolů.
Zkouška se skládá ze dvou částí.
Známka z předmětu je konstruována z výsledků v semestru a z výsledku zkoušky.
Literatura
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}