
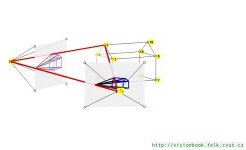
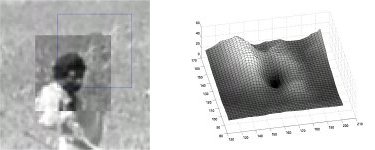
V rámci přednášek a cvičení předmětu bychom se měli naučit jak vyřešit netriviální úlohu v oblasti moderní robotiky. Naším cílem bude vyvinout metodu pro bezkontaktní měření vzdálenosti pomocí kamery přimontované pevně na robotu se dvěma stupni volnosti. Mimo jiné se soustředíme na to, jak správně geometricky popsat soustavu se všemi parametry, na optimální řešení takto vzniklých algebraických rovnic a na robustní algoritmy počítačového vidění pro pokročilou variantu bez interakce s uživatelem.
Zkouška je písemná, ústní dozkoušení v případě nejasností, či bodovém zisku na hranici známek. Ke zkoušce si lze přinést jako pomůcku 1 list A4 s ručně psanými poznámkami či náčrtky. Popsaný může být oboustranně. Budu rád, když mi pak váš popsaný list necháte, resp. necháte mne udělat si z něj kopii. Pro mne to bude cenná zpětná vazba. Dále pak budete potřebova několik volných listů A4 nepopsaných, psací potřeby a kalkulačku, která možná nebude potřeba vůbec. Za zkoušku lze získat 50 bodů, systém hodnocení viz níže.
Za úlohy ve cvičení je možné získat 50 bodů (minimum pro zápočet je 20), stejně tak za výsledek písemné závěrečné zkoušky (opět minimum 20). Celkem je tedy možné získat 100 bodů. Hodnocení podle studijního řádu, tedy: 100-90=A, 89-80=B, 79-70=C, 69-60=D, 59-50=E, <50=F. Během cvičení se bude požadovat samostatná práce, odevzdané úlohy jsou automaticky kontrolovány na přítomnost plagiátů. Věnujte také prosím termínům odevzdání jednotlivých úloh a nenechávejte odevzdání na poslední chvíli.
Knihy lze vypůjčit v knihovně skupiny CMP. Knihy od kterých je více kopií lze půjčit na několik dnů, ostatní prezenčně k okopírování důležitých částí. Časopisecké a konferenční články jsou obvykle dostupné na webu.