[
hlavní stránka cvičení |
rotace |
interpolace |
výpočet parametrů |
samostatná práce
]
3. cvičení: Geometrické transformace – rotace
V tomto cvičení se budeme zabývat (globálními) geometrickými
transformacemi obrázku. Budeme tedy posouvat souřadnice
jednotlivých bodů, nikoli jejich jasové hodnoty. Globální znamená, že
jednu tranformaci aplikujeme na všechny souřadnice obrazu. Takové
tranformace nacházejí velmi široké uplatnění při úpravách fotografií
a lze je provádět interaktivně
s použitím např. programu GIMP.
Pro jednoduchost se zaměříme na rotaci.
Vlastní transformace obrazu má dvě části: transformaci souřadnic
bodů a interpolaci jasu v nich. Pokud se snažíme o rektifikaci obrazu do
referenčního souřadného systému, musíme nejprve potřebnou transformaci
vypočítat.
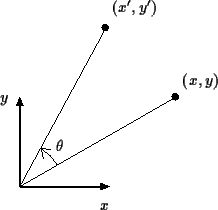
Rotace
Transformaci souřadnic [x y]'
rotací okolo počátku o úhel θ v kladném směru otáčení
lze popsat maticově:
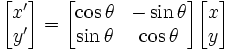
Zamyslete se, zda v našem případě stačí rotace okolo počátku.
Kladný směr otáčení je definován od kladné první osy ke kladné druhé ose
(v našem případě od x k y). Nezapomeňte, že v obraze má
osa y opačný směr.
Všimněte si, že jediným maticovým násobením lze transformovat N bodů,
stačí je zapsat do jedné matice velikosti 2×N. Kromě lepší
přehlednosti to v MATLABu přináší zrychlení oproti cyklu.
Pro vytvoření rotovaného obrazu potřebujeme:
- znát velikost, kterou nový obraz v neotočené 2D mřížce zabere
- znát souřadnice bodů v mřížce – lze použít funkci
meshgrid()
- vypočítat, které původní souřadnice odpovídají souřadnicím v mřížce
(zpětná transformace)
- interpolovat hodnoty z původních dat
| |
|
Interpolace
MATLAB nabízí pro interpolaci funkci interp2(), kde lze
pomocí parametrů vybrat metodu. Implementaci nejjednodušší metody
nearest neighbor si můžete vyzkoušet sami.
Výpočet parametrů transformace
Zatím jsme předpokládali znalost parametrů transformace, tu ale
například při narovnání našikmo pořízené fotografie předem nemáme.
Pokud ale obraz obsahuje výrazné hrany, které chceme natočit do
určitého úhlu můžeme Radonovou transformací (doc radon)
ve výkonovém spektru nalézt nejčastěji zastoupený směr hran. Rotaci
stačí spočítat jako rozdíl mezi tímto a požadovaným směrem.
 |
 |
 |
 |
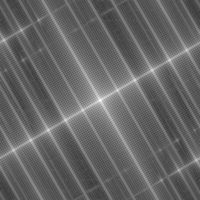
| vstup |
log(im_Pfft) |
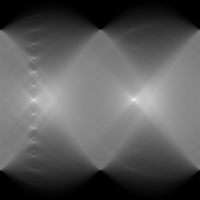
Radonova transformace
aplikovaná na log(im_Pfft) |
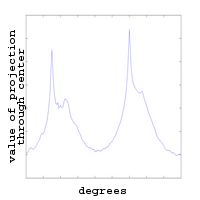
hodnoty odpovídající
projekcím počátkem |
Radonova transformace – zjednodušené vysvětlení
Radonova transformace provádí 2D→1D projekci intenzit v obraze
pod různými úhly. Představte si vodorovné přímky vedené každým
řádkem obrazu. V prvním kroku sečteme intenzity podél každé přímky
a výsledek uložíme do prvního sloupce výstupní matice. V druhém
kroku pootočíme přímky o zadaný úhel, sečteme intenzity podél nich,
a výsledek uložíme do druhého sloupce. Takto postupujeme pro zadaný
rozsah úhlů, v MATLABu defaultně 0:179 stupňů.
Stejnou 2D→1D projekci se změnou úhlu provádí rentgen v počítačové
tomografií (CT). My Radonovu transformaci použijeme pro nalezení
přímky s nejvyšší intenzitou.
Samostatná práce
Váš kód bude otestován automaticky na sadě obrazů,
které nebudete mít při vývoji k dispozici. Je proto důležité:
- přesně dodržet rozhraní funkcí: jméno, vstupní/výstupní parametry
- můžete si přidat nepovinné parametry pro ladění, zobrazování atp.,
ale funkce musí fungovat i bez nich
- implementovat obecně, aby vaše metoda fungovala na různých obrazech
- odevzdávaná verze vašich funkcí nemá zobrazovat ani vypisovat žádné
(mezi)výsledky, stejně je neuvidíte
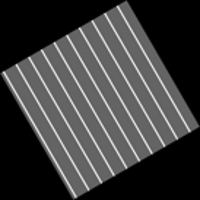
Implementujte funkci theta = estimaterotation(I),
kde I je dvourozměrná matice typu uint8
reprezentující šedotónový obraz s výraznou pravoúhlou strukturou,
vychýlenou max. o ±40 stupňů od os obrazu.
Výstup theta udává, o jaký úhel (ve stupních v kladném
směru x→y) je nutné fotografii otočit, aby struktura souhlasila
s osami obrazu. Např. pro tuto fotografii
theta = -10.
[1.5 bodu + 0.5 bonus dle počtu správně určených obrazů]
Implementujte funkci R = rotationmatrix(theta),
která vytvoří rotační matici R 2×2
pro úhel theta stupňů.
[0.5 bodu]
Implementujte funkci Ir = rotateimage(I,R), která
provede rotaci obrazu zadanou rotační maticí R
a vrátí výsledek jako dvourozměrnou matici Ir
typu uint8. Nesmí dojít k oříznutí obrazu ani
přidání zbytečných okrajů – vypočtěte přesně velikost
vzniklého obrazu. Očekáváme vaši vlastní implementaci metody
nearest neighbor, nepoužívejte funkce interp2,
imrotate, imtransform nebo tformarray.
[2 body]
Každý krok je hodnocen nezávisle, tj. i pokud váš
algoritmus selže v prvním nebo druhém kroku, dostanete jako vstup do
následujícího kroku správné hodnoty.
Vyhodnocení uvidíte a budete mít možnost nahrát opravenou verzi.
Nedostanete víc bodů, než kolik vám sdělí automatické vyhodnocení.
Pokud si myslíte, že nefunguje správně, ozvěte se cvičícím před
vypršením termínu odevzdání.
[ ZSO cvičení | Za stránku zodpovědný: Tomáš Svoboda ]
{kind=link}