| 33PVI Počítačové vidění pro
informatiku |
| Přednášející: |
Tomáš Pajdla |
Rozsah: |
2 + 2 |
Obor: |
VT |
| Cvičí: |
Michal Havlena
Zuzana Kúkelová |
Kredity: |
4 |
Dop. semestr: |
8 |
| Katedra: |
K333 |
Zakončení: |
z, zk |
Typ předmětu: |
Pov. vol. |
Ivan Šimeček a Pavel Kordík
Ze dvou různých obrazů
udělat pokud možno
bez kazů
velkolepé panoráma
to je nářez, to je rána ...
Program přednášek (témata ke zkoušce)
-
[27.2.]
Počítačové
vidění - Computer-Vision-Show.ppt, Boujou,
Matlab
- [06.3.] Mozaika
a rekonstrukce
- zajimavé problémy v počítačovém vidění, obraz , rekonstrukce, korespondence, kamera. Lineární
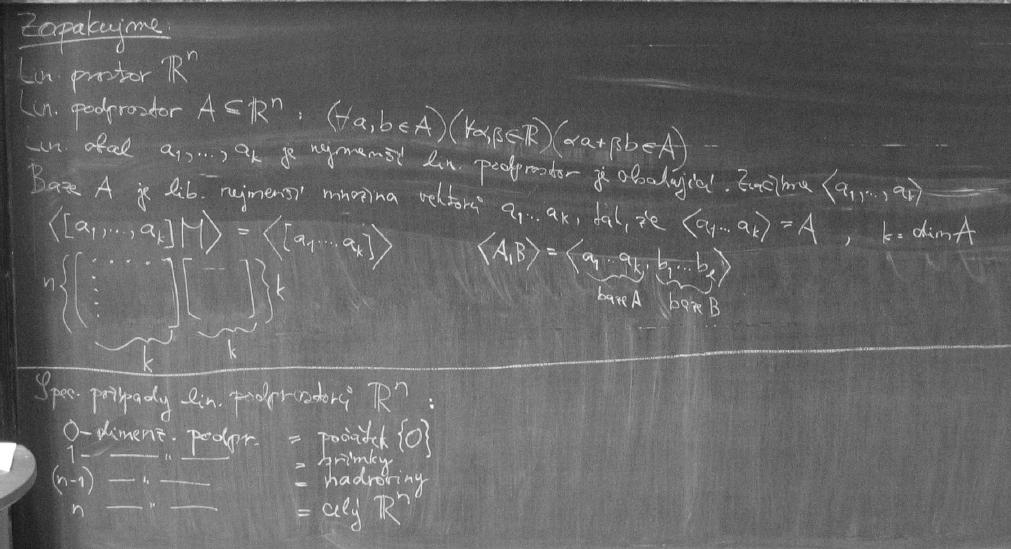
prostor, affinní prostor [PVI-2006-Lecture-02.pdf]
- [13.3.] Souřadná soustava kamery a její volba, interpretace matice přechodu mezi bázemi lineárního
prostoru, vztah mezi souřadnicemi bodu v prostoru a
souřadnicemi jeho projekce.
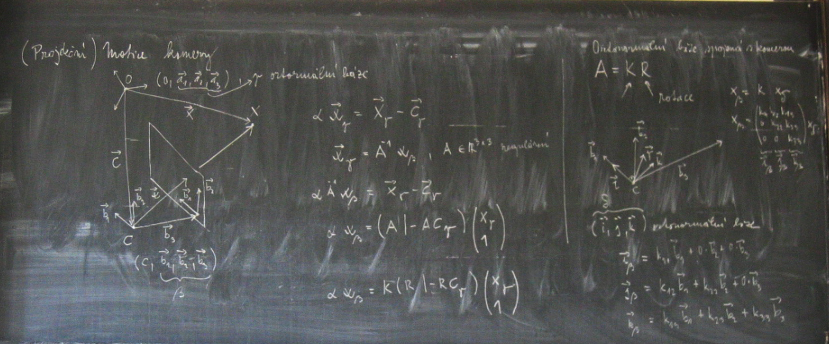
Matematický
model perspektivní kamery v afinním prostoru, dva obrazy
scény pořízené kamerami se stejným středem promítání, středové
promítaní roviny na rovinu. Vztah mezi souřadnicemi bodů
v obrazech pořízených kamerou rotující okolo středu
promítání. Rovnice pro výpočet matice H. [PVI-2006-Lecture-03.pdf]
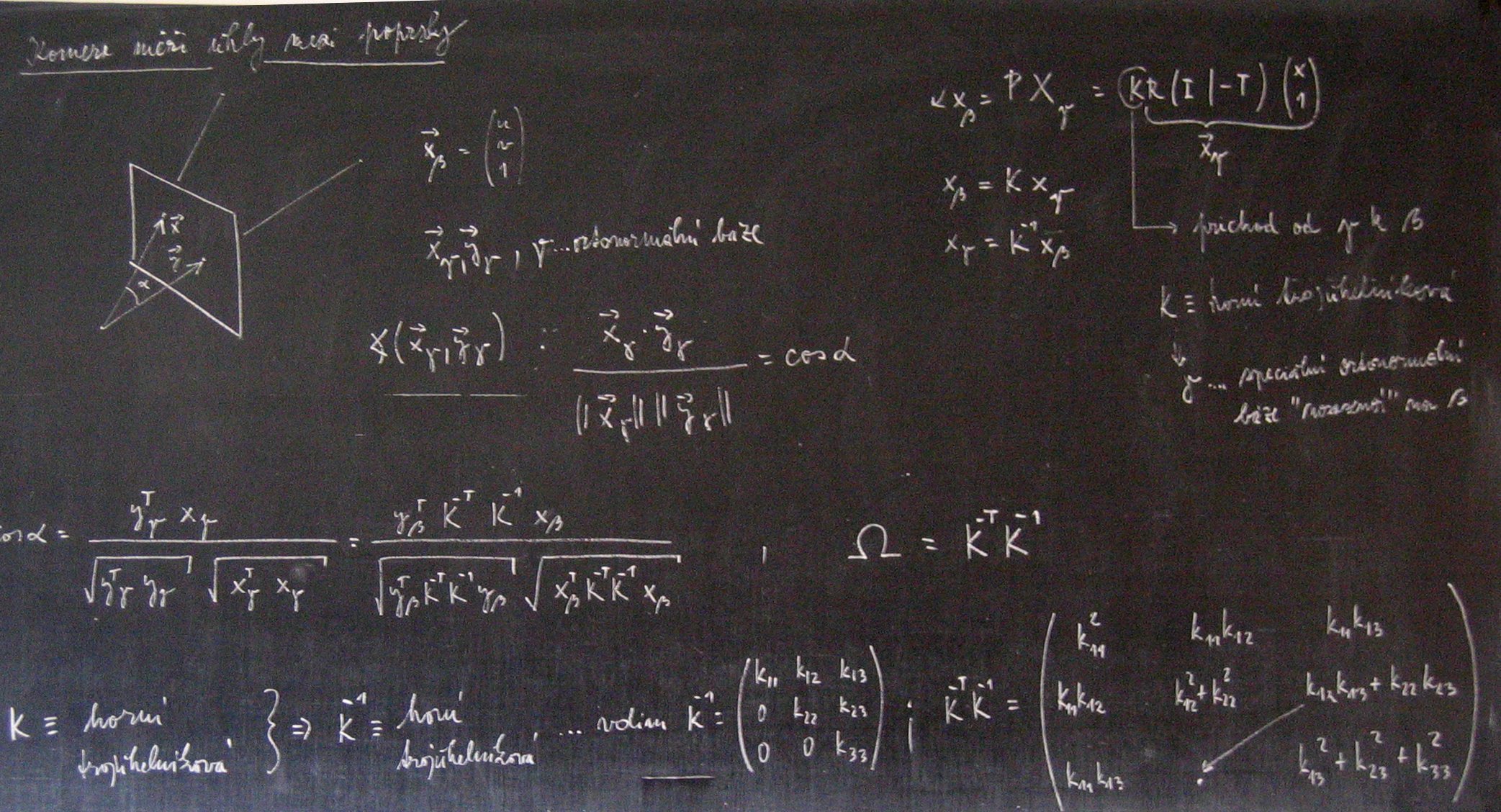
- [20.3.] Metrická souřadná
soustava kamery, matice kamery, její dekompozice KR [ I | -T ].
Vztah mezi souřadnicemi obrazů bodů roviny v
prostoru. [T1,
T2,
T3].
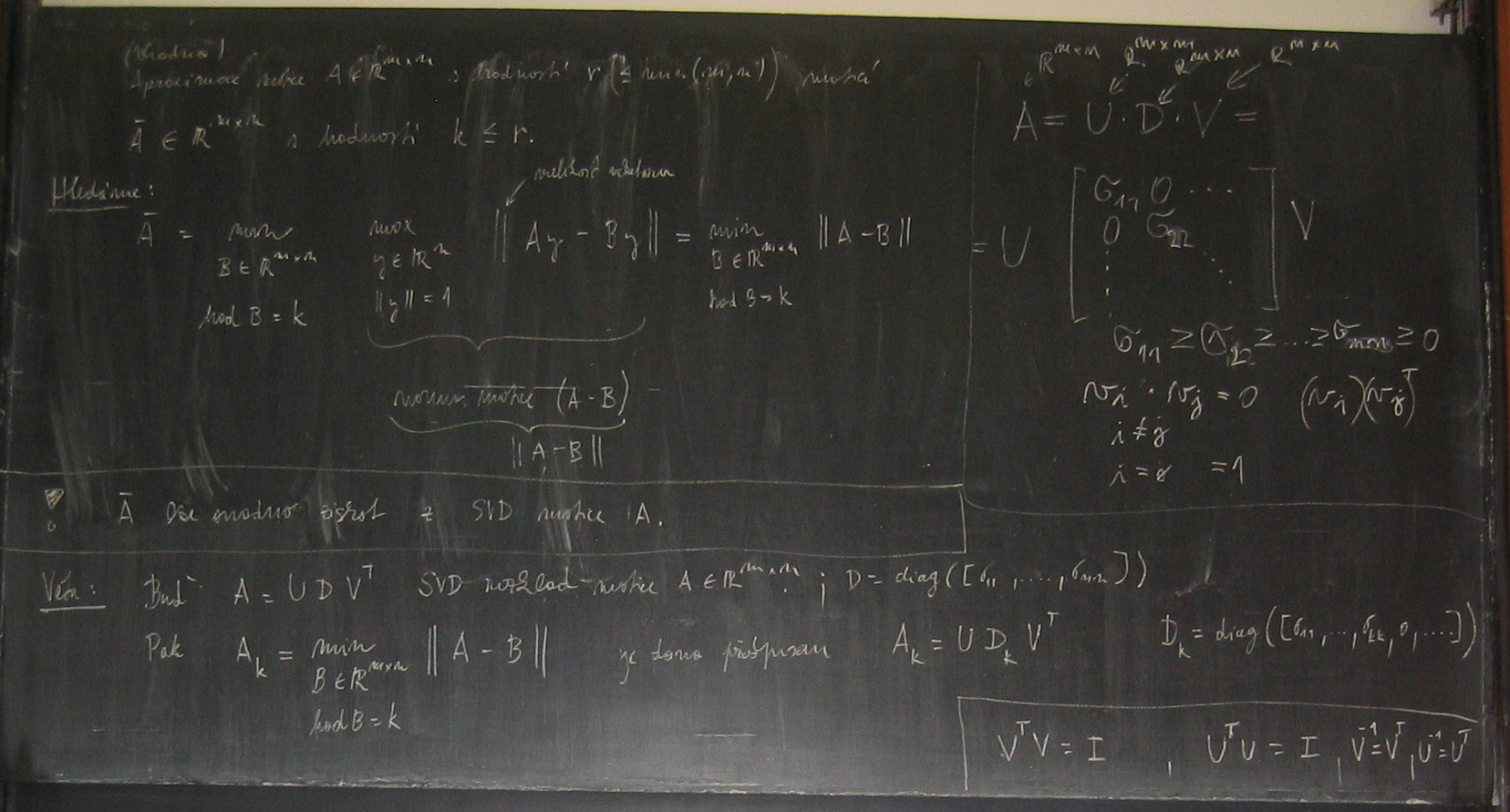
- [27.3.] SVD, interpretace ve 2D - kružnice a elipsa, řešení
přeurčených soustav homogenních rovnic [PVI-2006-Lecture-05-06.pdf,
T1,
T2,
T3]..
- [03.4.] Důkaz optimality řešení soustav přeurčených rovnic pomocí SVD.
Normalizace souřadnic pro zlepšení stability řešení.[T1,T2,T3,T4]
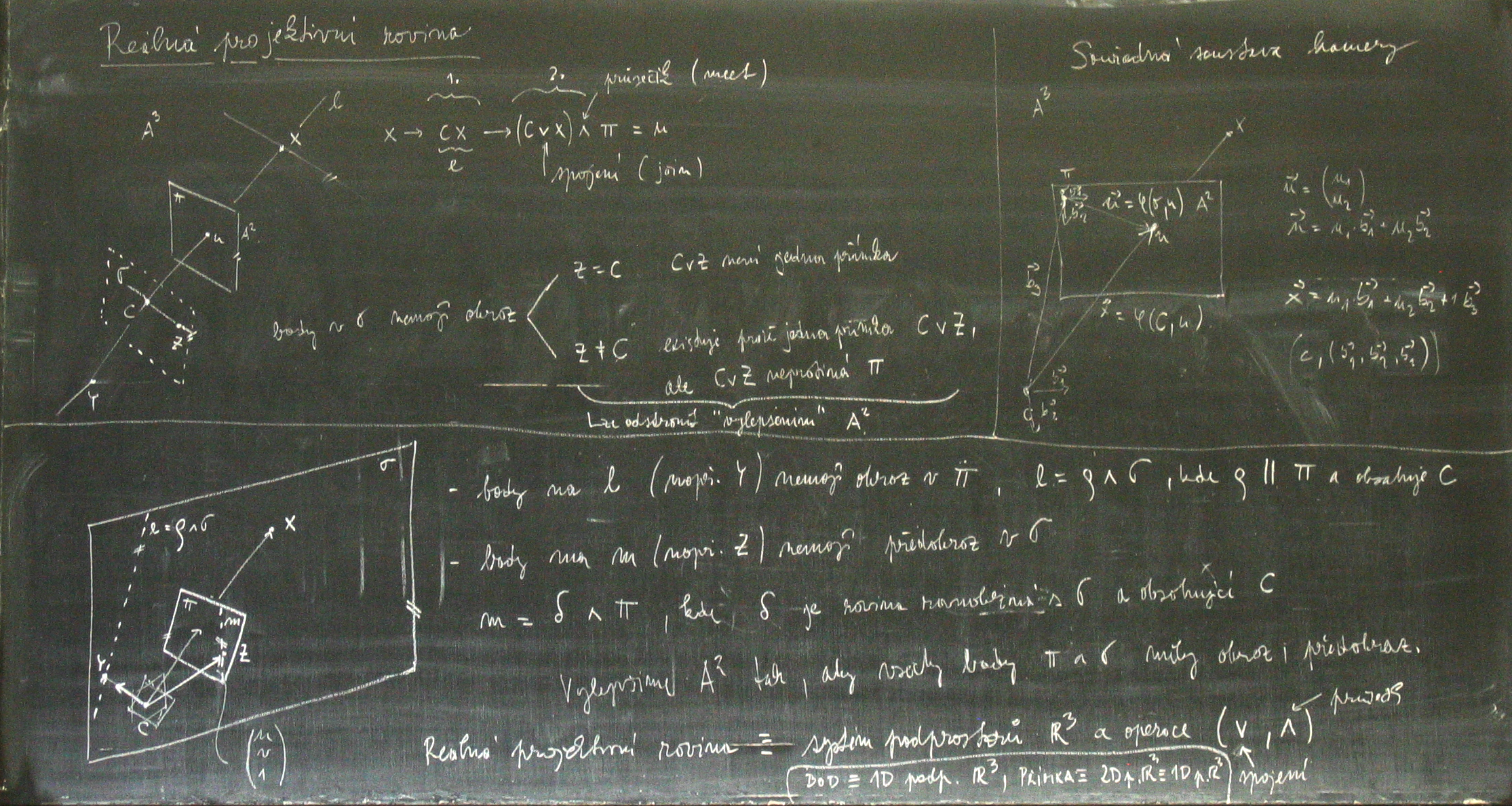
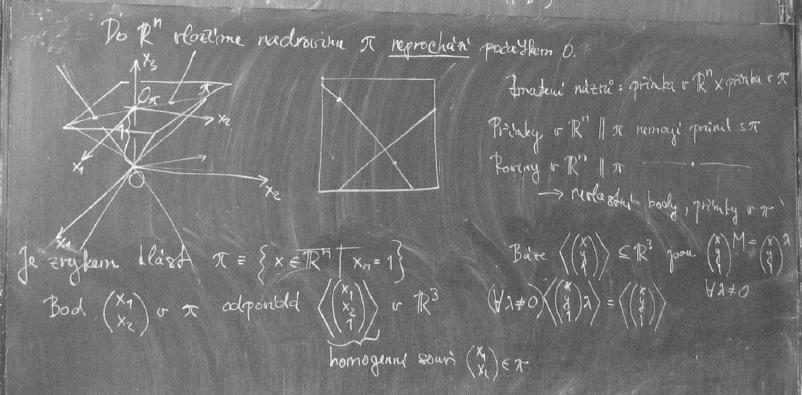
- [10.4.] Reálná projektivní rovina, rozšíření reálné afinní roviny na reálnou
projektivní rovinu, reprezentace reálne projektivní roviny v afinním a vektorovém
prostoru, (homogenní) souřadnice bodu a přímky, reprezentace bodů, přímek, rovin
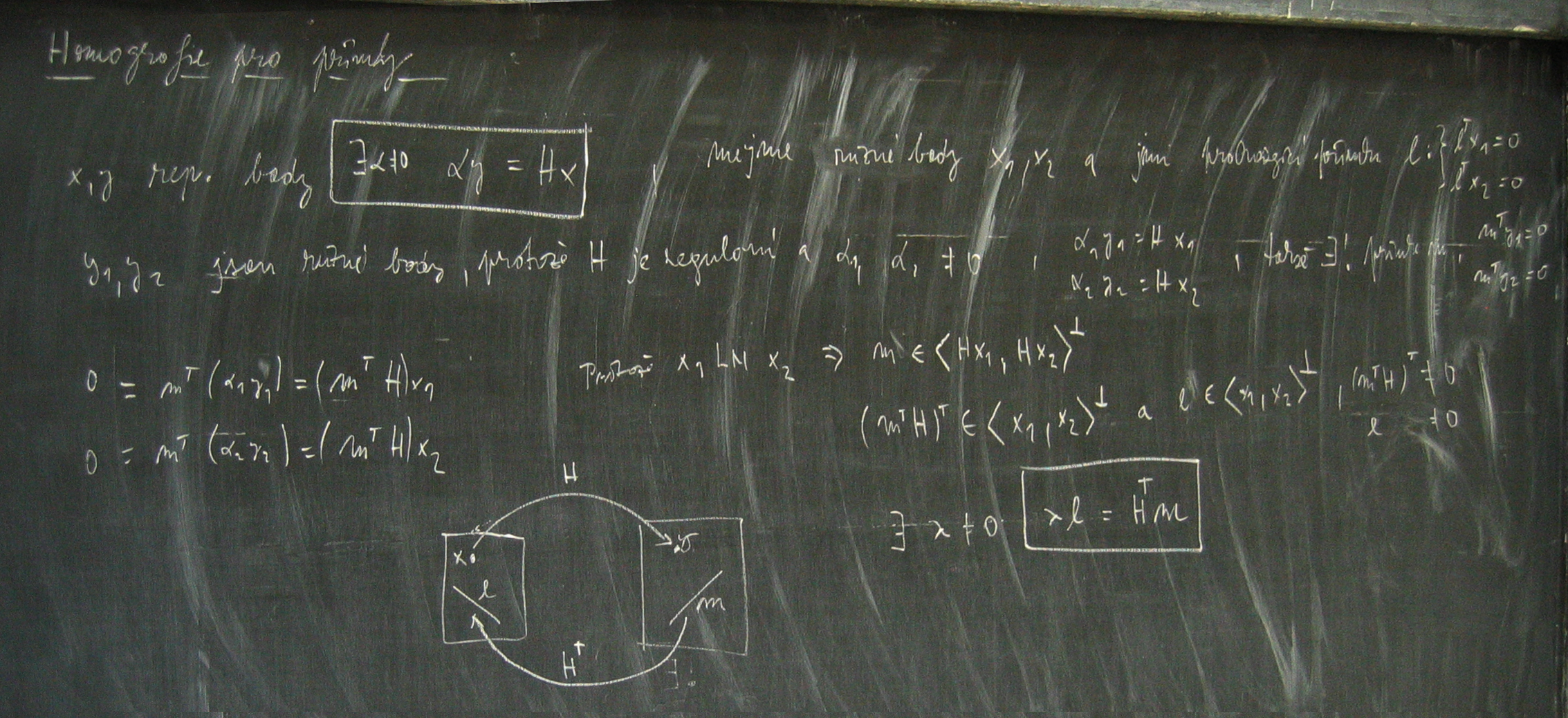
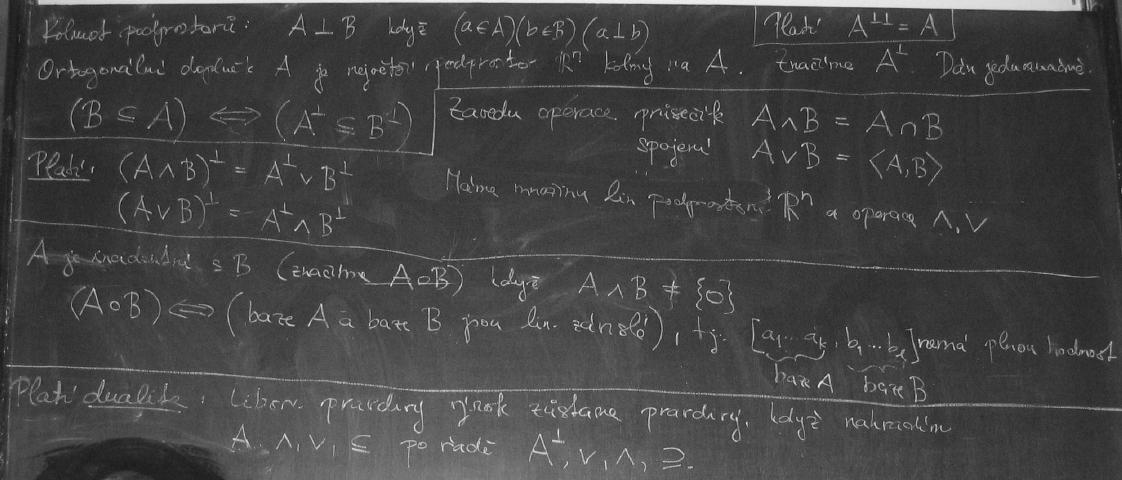
podprostory lineárního prostoru, protínání a spojování. Rovnice pro výpočet matice H z homogenních souřadnic bodů a přímek. Vztah
mezi homografií pro body a přímky [T1,T2,T3,T4].
- [24.4.] Body a přímky jako lineární podprostory,
doplněk, protínání a spojování [T1,T2,T3,T4].
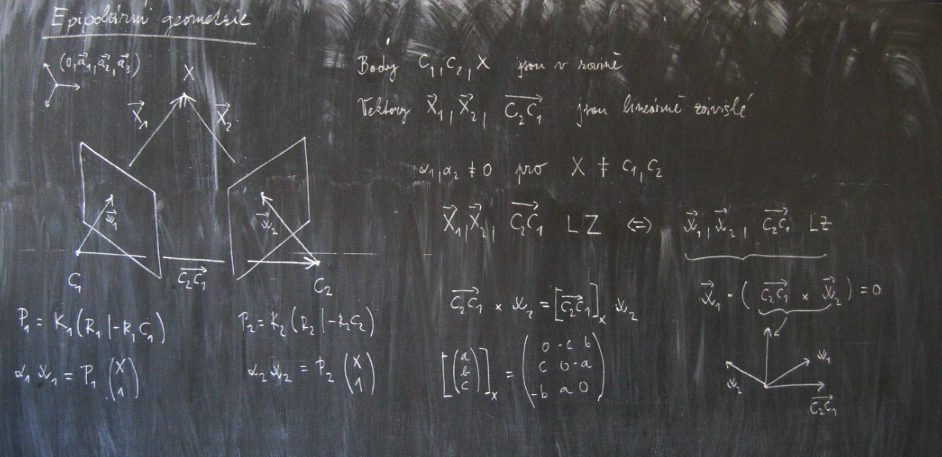
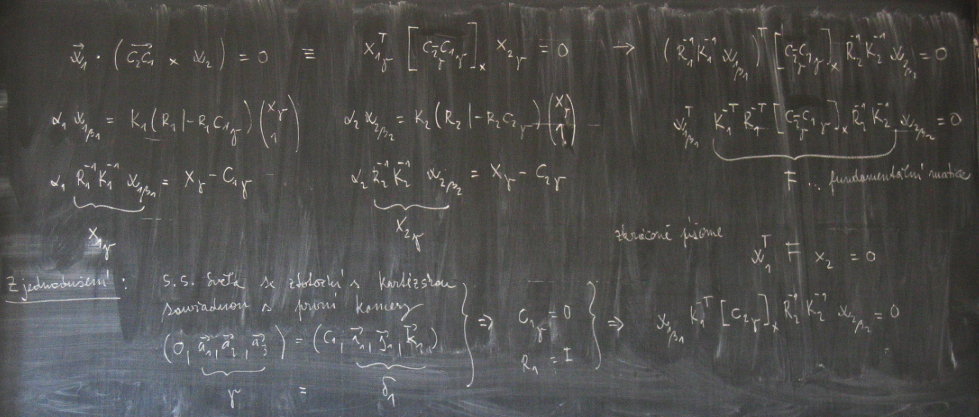
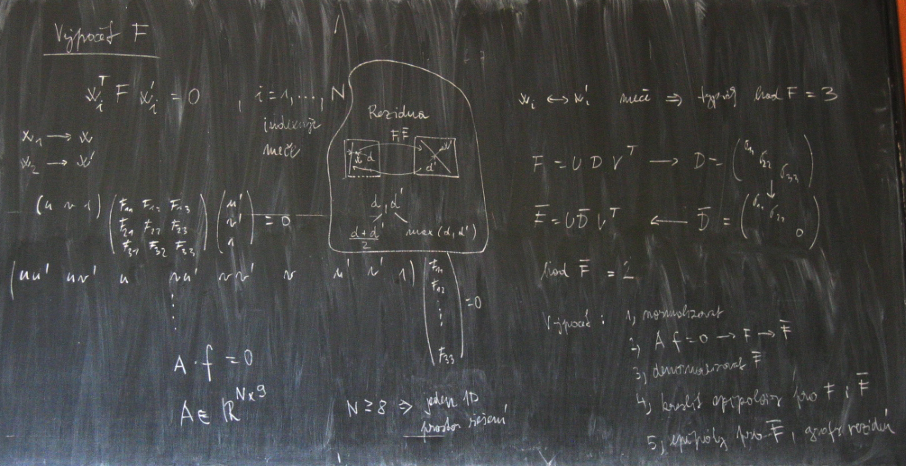
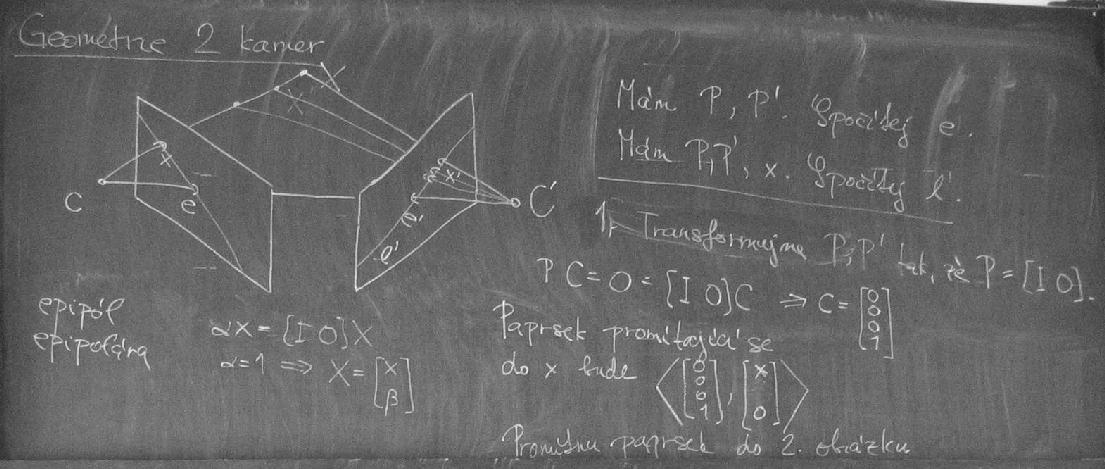
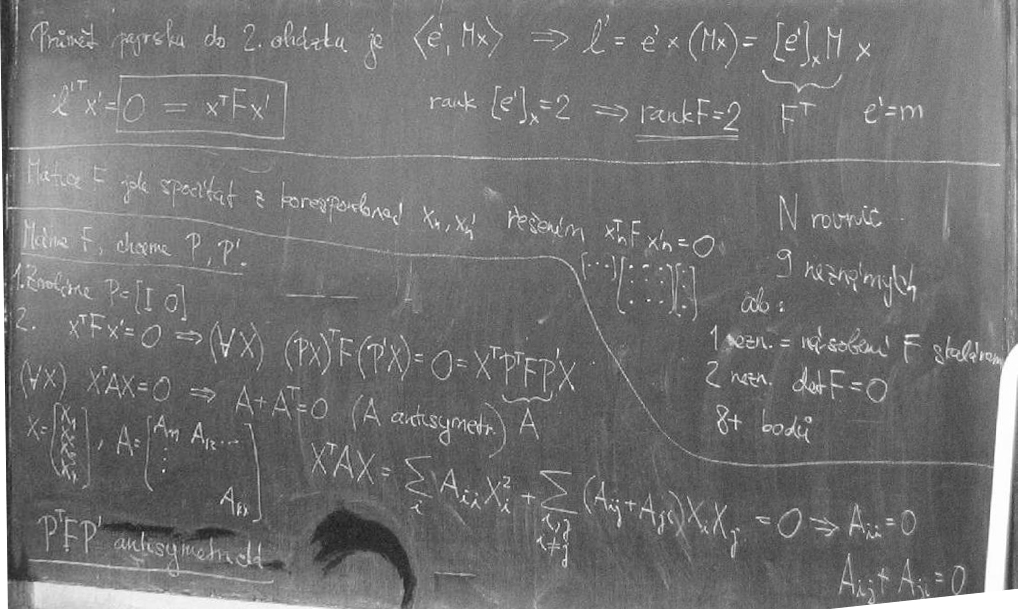
- [05.5.] Epipolární geometrie, fundamentální matice, epipóly,
epipoláry, výpočet F hodnosti 2, normalizace souřadnic pro zlepšení
podmímněnosti řešení [T1,T2,T3,T4,T5].
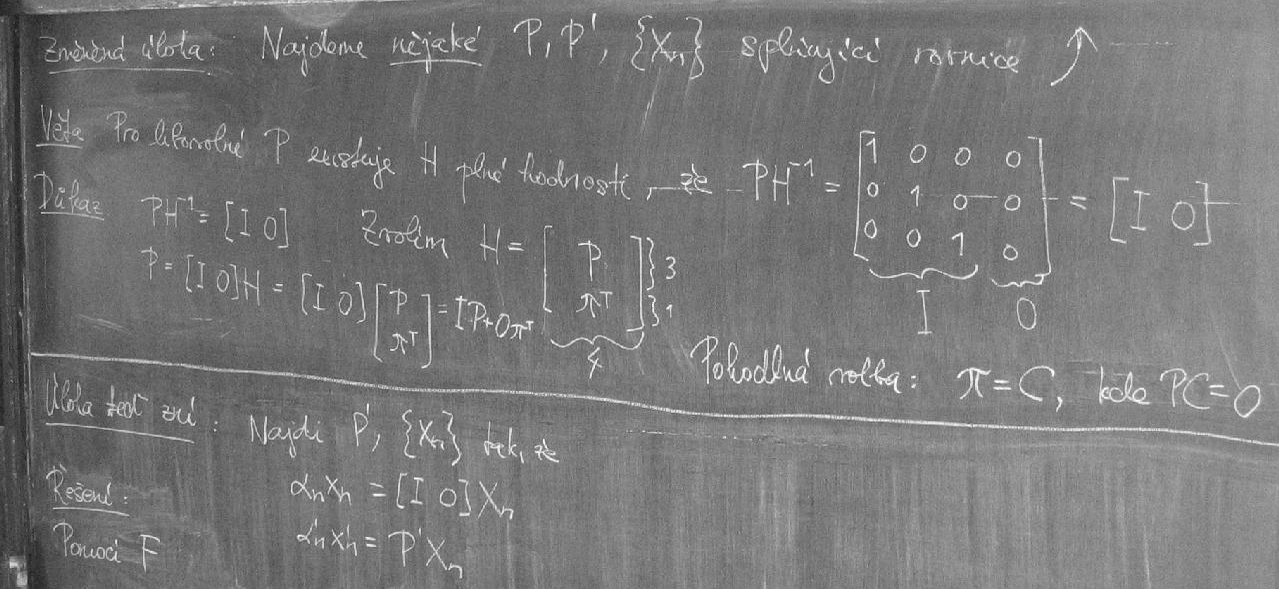
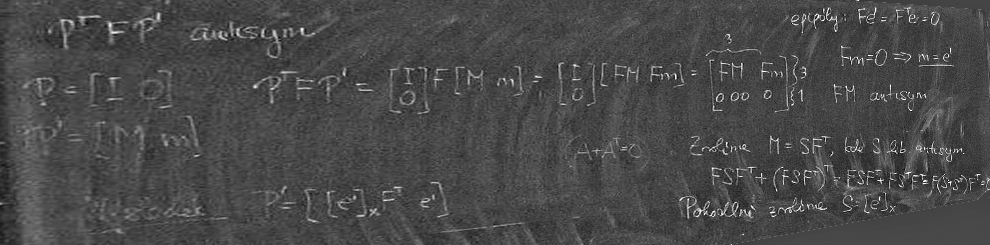
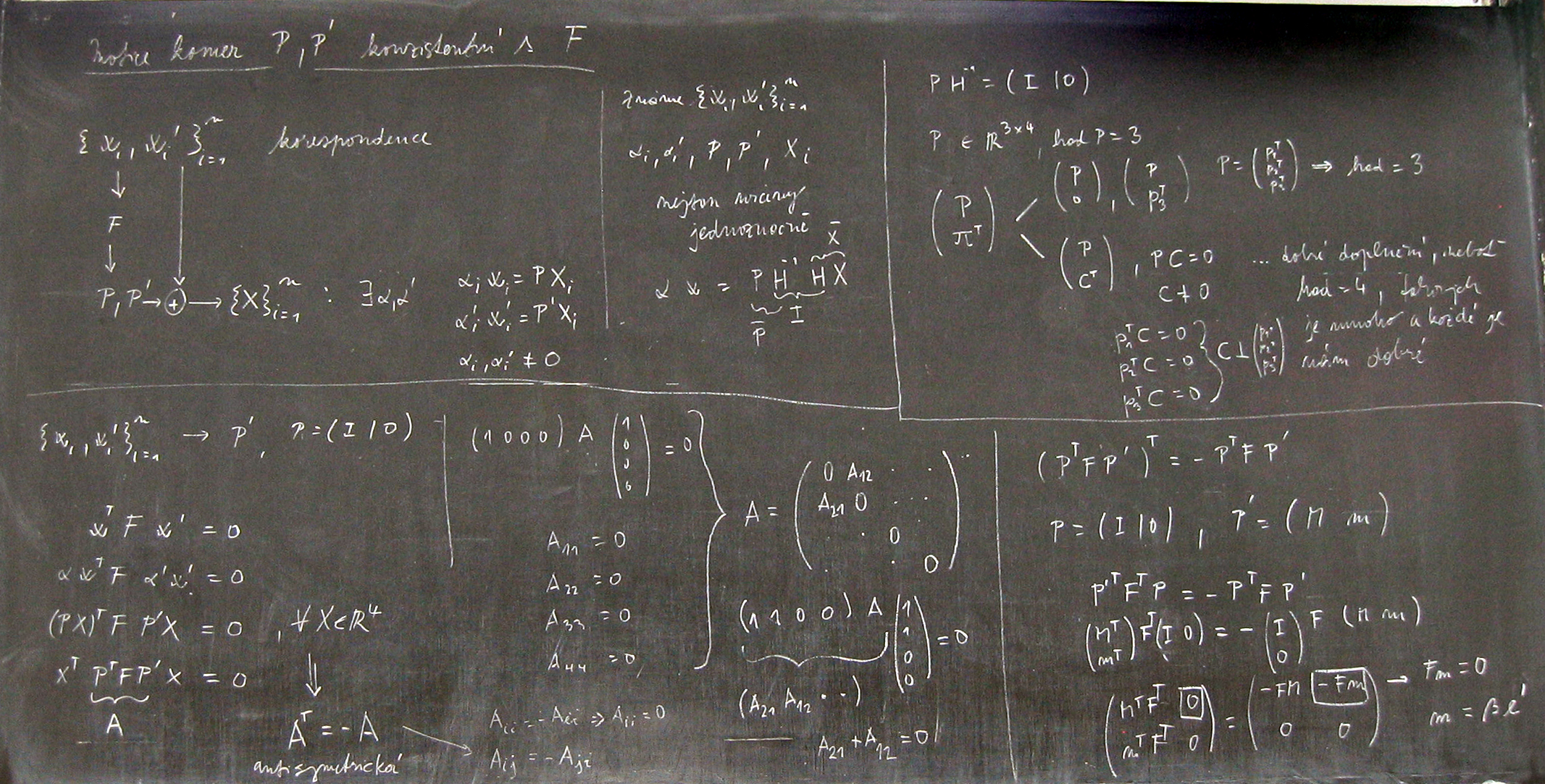
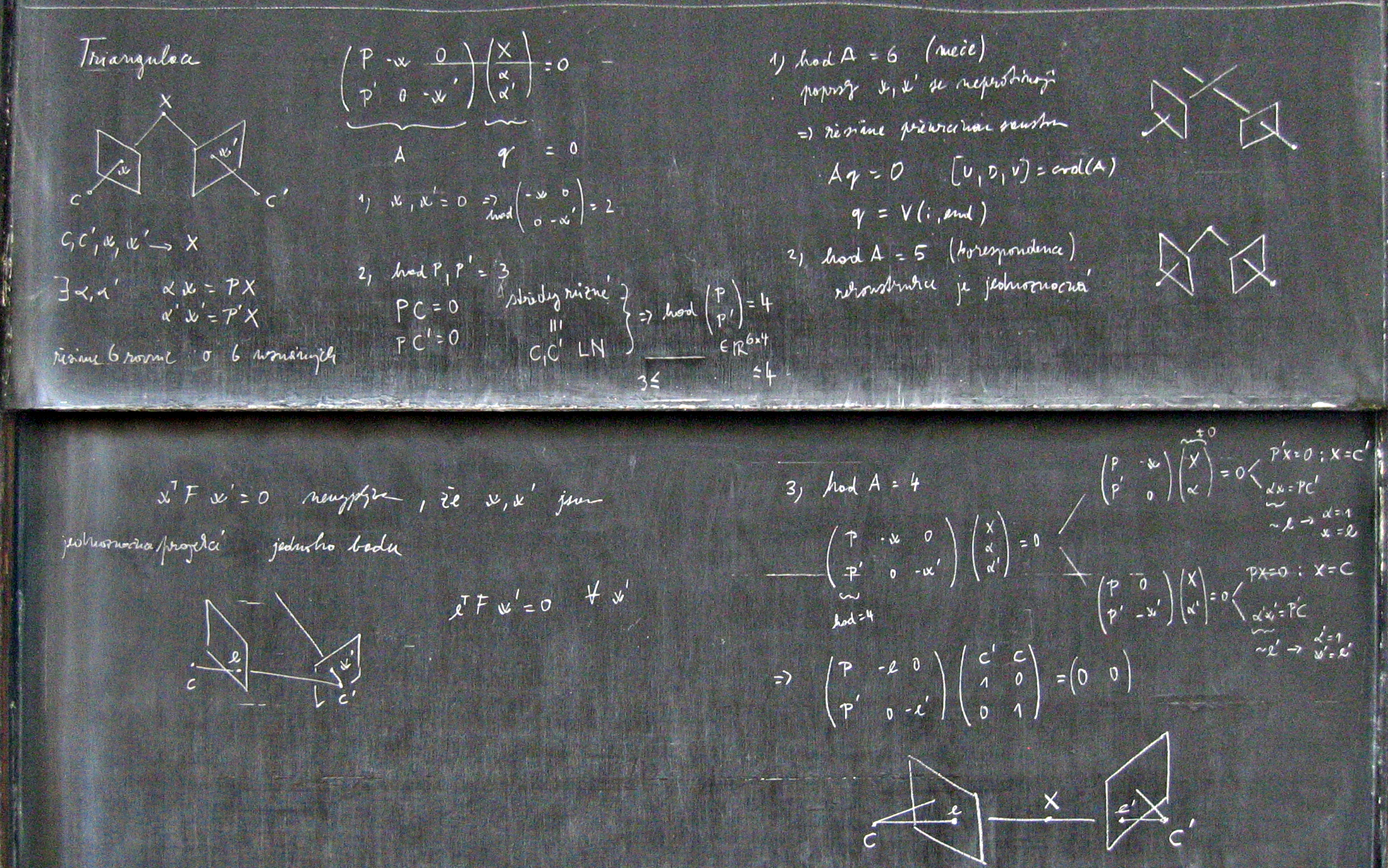
- [09.5.] Konstrukce matic kamer z
fundamentalní matice - I [T1,T2,T3,T4,T5].
- [15.5.] Triangulace mečů v prostoru, [T1,T2,T3],
homografie v prostoru [T1].
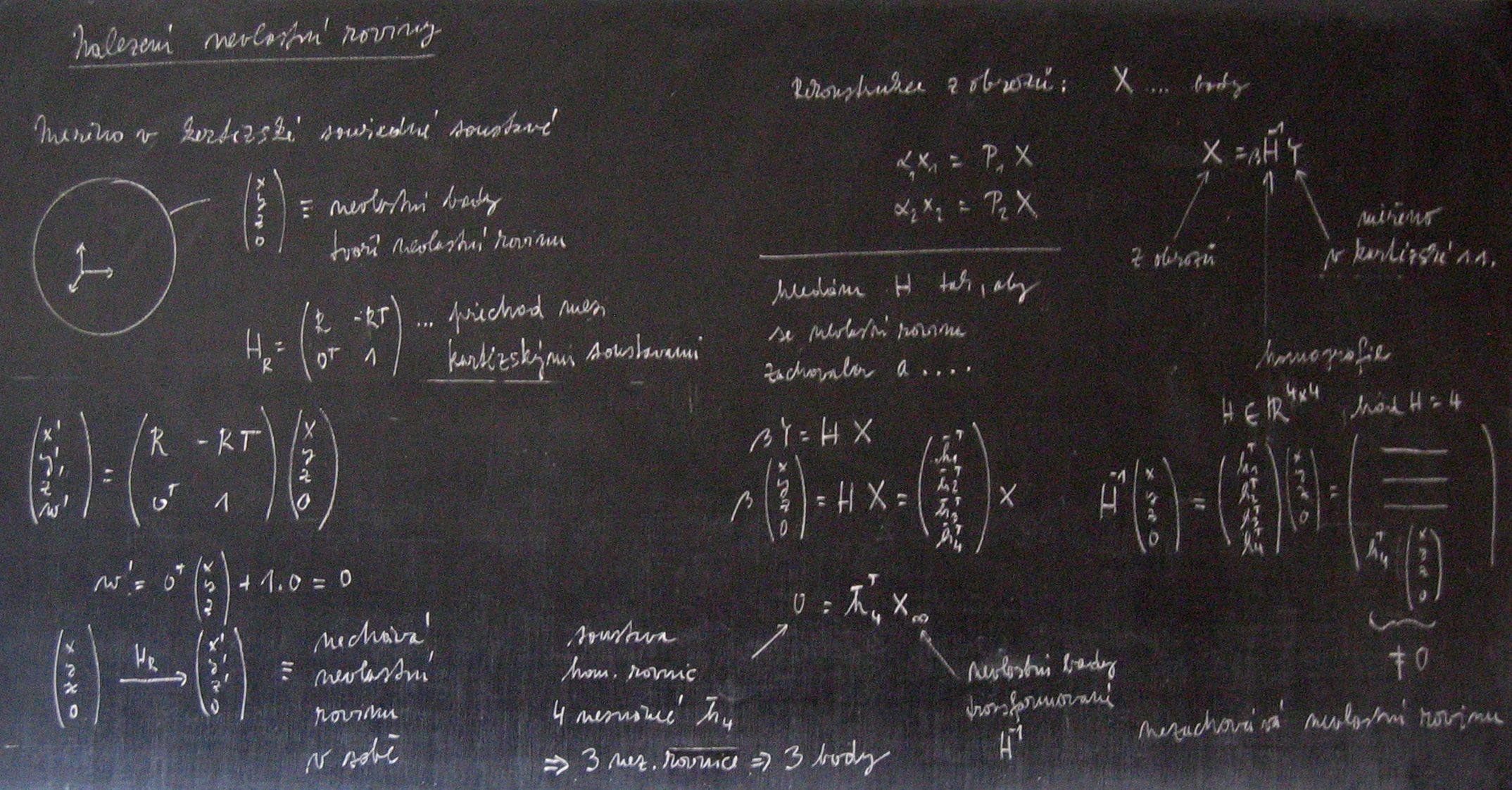
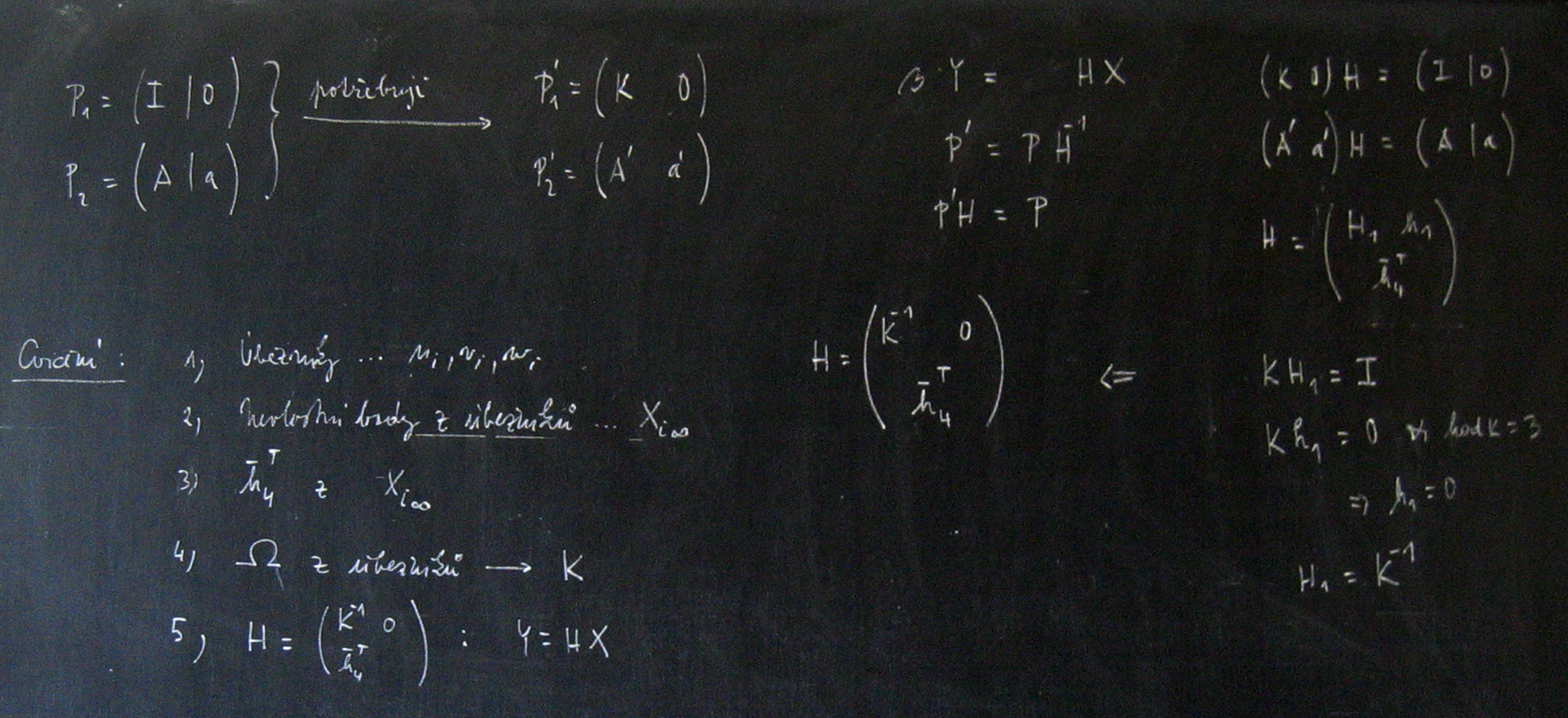
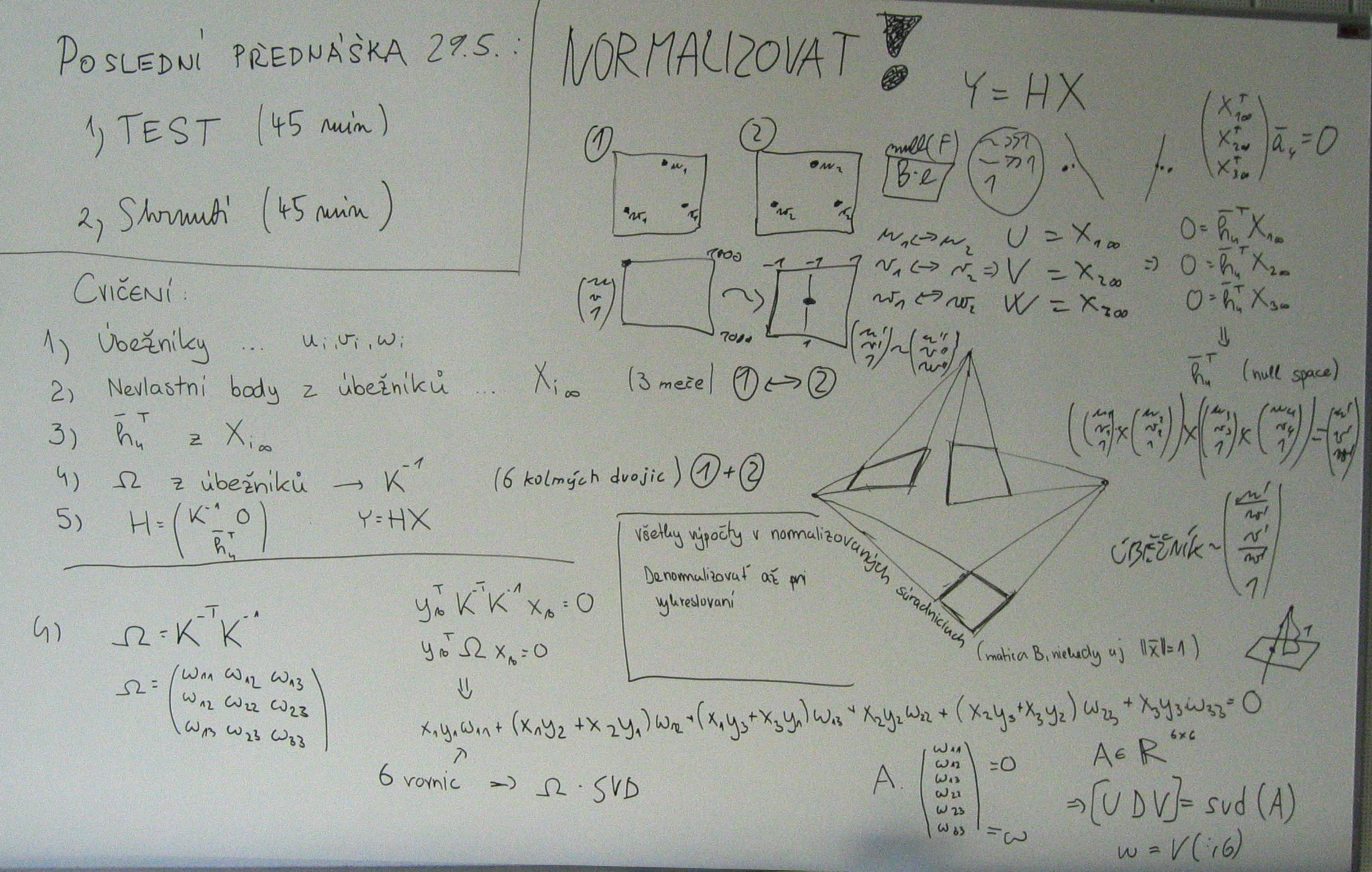
- [22.5.] Metrická rekonstrukce: úhel mezi paprsky, úběžníky, kalibrace nevlastní roviny,
matice K
z úběžníků, matice H z úběžníků [T1,T2,T3,T4,T5].
- [29.5.] Test & shrnutí.
Program cvičení
- [27.2.] konta, Test-alpha,
seznámení s
programem Matlab I.
- [06.3.] oprava testu-alpha, vektor, báze, dimenze,
lineární závislost a nezávislost, dvě definice lineární závislosti, Řešení
soustav lineárních rovnic, Frobeniova věta, charakterizace existence řešení v
řeči závislosti sloupců/řádků matice. Vektorový součin jako lineární zobrazení
[X]_x. [Pták 2006],
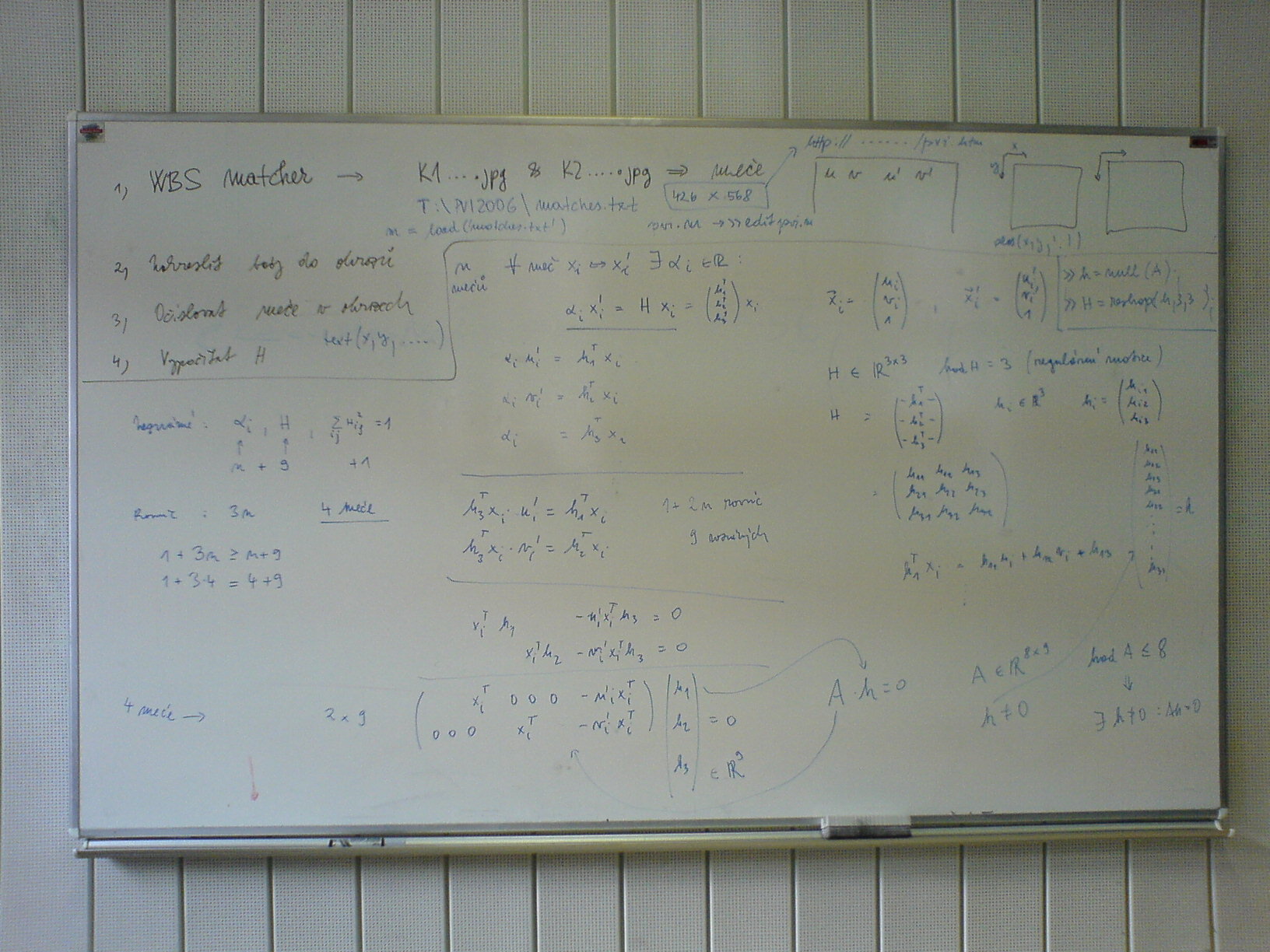
- [13.3.] WBS-stereo-matching
www
interface, Obrazy,
bodové a přímkové koresponence,
plotcorr.m,
plotlines.m,
linelabels.m.
Homografie pro 4 body [T1].
- [20.3.] Sestavení rovnic pro výpočet
homografie z bodů, ověření na čtyřech bodech. Test: souřadné
soustavy.
- [27.3.] Výpočet homografie z mnoha bodů, ověření na nezávislé množině [T1].
- [03.4.] Normalizace souřadnic, spojení obrazů.
- [10.4.] Test: souřadnice, homografie, SVD.
Homografie z přímek.
- [24.4.]
Homografie z přímek, otázky k úloze 1.
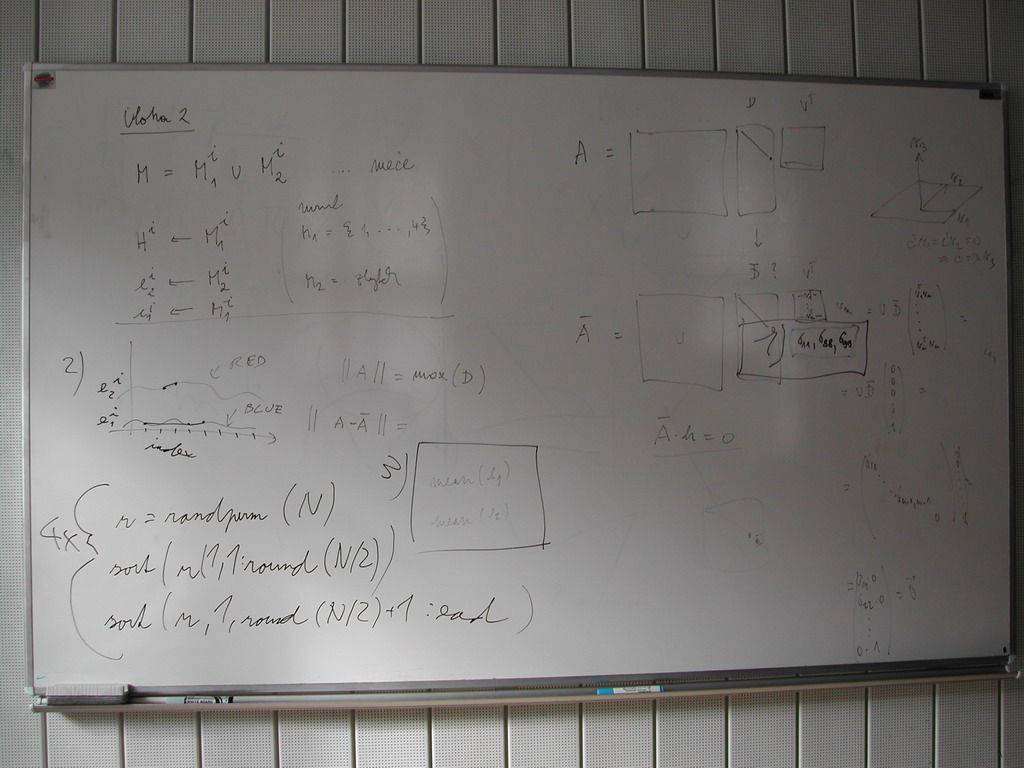
- [04.5.] Výpočet fundamentální matice pro
obrazy
jehlanu.
[T1].
- [09.5.] Konstrukce matic kamer a souřadnic bodů z
fundamentální matice a mečů.
[T1].
- [15.5.] Rekonstrukce bodů, převedení do metrické souřadné
soustavy homografií v prostoru [T1].
- [22.5.] Metrická rekonstrukce I [T1].
- [29.5.] Metrická rekonstrukce II, otázky k úloze 2.
Zkouška, testy, zápočet
- Na cvičení se řeší příklady, píší
testy a pracuje na úlohách.
- Úlohy se odevzdávají dle
Odevzdání (a zadání) úloh.
Podmínkou udělení zápočtu je obhájení dvou úloh. V průběhu
semestru studenti složí testy, jejichž výsledek se bude počítat do výsledné
známky.
Zápočet se uděluje u zkoušky na základě odevzdaných
prací. Práce se odevzdávají elektronicky a kontrolují na
webu, Odevzdání (a zadání) úloh.
Zkouška bude ústní u tabule nad příklady z písemné přípravy. Budete mít
90 minut
na přípravu příkladů. Během přípravy můžete použít libovolnou off-line
literaturu, ne však internet. Musíte pracovat samostatně. Zajímá mě, jak látce rozumíte, ne, jak ji umíte
zpaměti. U každého symbolu, který se vyskytne v rovnicích, se vždy ptejte,
co reprezentuje a jaký má geometrický význam. Vždy si
odpovězte na to, jaký je obor hodnot, které mohou symboly nabývat. Vždy
se zeptám: "Proč?".
V ústní části zkoušky budu zkoušet
po trojicích. Budete prezentovat připravené příklady na tabuli a při tom budu pokládat otázky.
Nebude-li někdo znát odpověď, dostanou
příležitost ostatní. Přihlédnu k
písemkám v semestru, ale zkouška bude mít na výslednou známku zásadní vliv.
Zkouškové otázky se kryjí s programem
přednášek výše. Následujícími typy příkladů se budou objevovat v písemné
přípravě:
- Zapište souřadnice vektorů vzhledem k zadaným bazím.
- Vypočetěte hodnost matice A.
- Najděte všechna řešení soustavy lineárních rovnic A x = b pro
dané A, b.
- Najděte pravý nulový prostor matice A.
- Vyberte ze zadaných bodů ty čtveřice, které lze použít ke
kontrukci trojdimenzionální afinní souřadné soustavy.
- Vlastní body označte V, nevlastní N
- Vlastní přímky označte V, nevlastní N
- Najděte nevlastní bod, který leží na dané přímce.
- Které z následujících bodů leží na nevlastní přímce.
- Najděte průsečík přímek daných dvěma body.
- Najděte průsečík dané přímky a přímky procházející dvěma zadanými body.
- Mějte obrazový bod. Nakreslete souřadnou soustavu kamery a
vektor, který jej v ní reprezentuje.
- Mějte přímku v obraze. Nakreslete souřadnou soustavu kamery a
vektor, který ji v ní reprezentuje.
- Vypočtěte homografii danou čtyřmi body.
- Vypočtěte homografii danou pěti body, z nichž některé trojice leží na přímce.
- H je homografie pro body z 1. do 2. obrazu, l je přímka v prvním obraze, napište
homogenní souřadnice přímky v druhém obrazu.
- Doplňte F tak, aby epipóly e, e'.
- Doplňte F tak, aby byla fundamentalní matici.
- Doplňte F tak, aby x, x' byly v korespondenci.
- Doplňte F tak, aby l' byla epipolárou x.
- Napište matice kamer konzistentních s fundamentální matici F.
- Napište matice kamer konzistentních s fundamentální matici F,
které promítají bod X do x.
- Zkonstruujte matice kamer, aby byly konzistentní s danou
fundamentální matici.
- Pro zadaných 5 dvojic bodů spočtěte homografii, která je zobrazí
na sebe.
- Mějte matice kamer P, P' a bod x v obraze. Doplňte souřadnici bodu x'
tak, aby existoval v prostoru bod, který se do x, x' promitá. Souřadnice bodu v
prostoru vypočtěte.
- Nalezněte všechny projekční matice kamer konzistentní s F a
promítající zadané body do zadaných obrazů.
- Najděte všechny středy kamer pro částečně zadanou projekční
matici.
- Mějte souřadnice pěti různých úběžníků. Vypočtěte kalibrační
matici kamery.
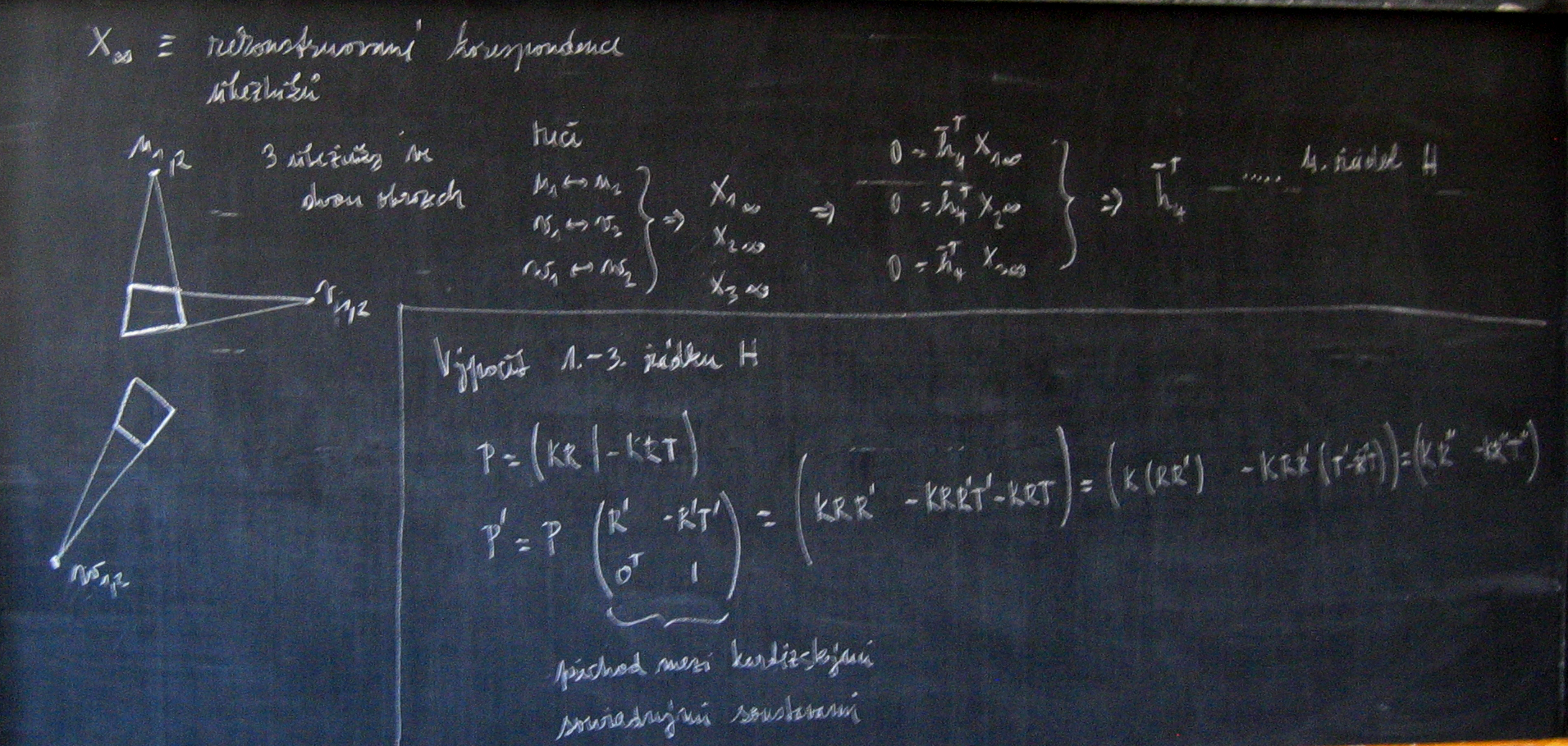
- Mějme matice kamer a meče pro tři úběžníky. Najděte rovnici nevlastní roviny.
- Mějte rekonstrukci scény vzhledem k nějaké neznámé souřadné soustavě a
žádanou kalibrační matici K kamer a rovnici nevlastní
roviny. Najděte metrickou rekonstrukci scény.
Harmonogram semestru
- 1. týden - Test-alpha
- 4. týden - Test
A
- 7. týden - Test B, odevzdání úlohy 1: mozaika z obrazů
- 14. týden - Test
C, odevzdání úlohy 2: rekonstrukce
První spuštění Matlabu
Informace o kontech na K333 naleznete na http://cs.felk.cvut.cz/konta/.
- Vytvořte shortcut na soubor matlab.exe na plose.
- Vytvořte ve svém domovském adresáři g: adresář Matlab a do nej umístěte
soubor startup.m.
- Nastavte v ``Properties'' shortcutu ``Start in'' na g:\Matlab.
- Spusťte Matlab.
Literatura
- E. Krajník. Maticový počet. Skriptum. Vydavatelství ČVUT,
Praha, 2000.
- P. Pták. Introduction to Linear Algebra. Vydavatelství ČVUT, Praha,
2006.
- T. Pajdla. Poznámky k přednášce PVI 2006.http://cmp.felk.cvut.cz/cmp/courses/pvi2006/
- J. Šochman, T.Pajdla. Matematický model kamery v afinním
prostoru. ftp://cmp.felk.cvut.cz/pub/cmp/articles/sochman/Sochman-TR-2002-11.pdf
- R. Hartley and A.Zisserman. Multiple View Geometry in Computer
Vision. Cambridge University Press, 2000.
Vybrane kapitoly lze zadarmo okopírovat v CMP. Kontaktujte
RNDr. Evu Matyskovou, matyskov@cmp.felk.cvut.cz.
Tomas Pajdla 2005-02-26 {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}