Tracking by an Optimal Sequence of Linear Predictors
Karel Zimmermann, Tomas Svoboda, Jiri MatasDepartment of Cybernetics
Faculty of Electrical Engineering
Czech Technical University Prague
|
Tracking by an Optimal Sequence of Linear PredictorsKarel Zimmermann, Tomas Svoboda, Jiri Matas |
Center for Machine Perception Department of Cybernetics Faculty of Electrical Engineering Czech Technical University Prague |
Award
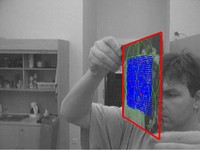
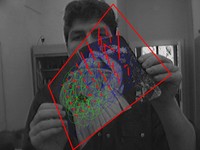
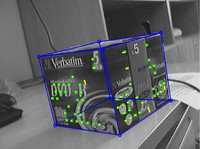
Movies
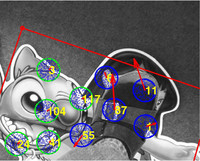
Motion blur (images)
|
Download
AbstractWe propose a learnable tracking method, where the computational complexity is explictly taken into account. The computational complexity, defined as the total number of pixels used for linear motion prediction, is minimized during an offline learning stage. Learning algorithm, based on linear and dynamic programming, searches for an optimal predictor, given a range of admissible motions, desired accuracy and a set of training examples. As a result, the globally optimal sequence of predictors covering the object is delivered. The local motion is determined only by a few hundreds of multiplications resulting in tracking with a fraction of the processing power of a desktop PC. The global motion of the object is robustly estimated by Ransac algorithm from some local motions. We also make explicit the trade-off between the number of estimated local motions and the number of Ransac iterations. The optimal predictor is applied to real-time object tracking and its performance superiority and robustness are experimentally demonstrated. Support
References
|