Documentation
The authoritative documentation is the PDF document
gposolver-VERSION.pdf, located in the
directory doc in the distribution archive of
the respective GpoSolver version. The documentation for
the latest version of GpoSolver can be downloaded from
here:
Problems solvable by
GpoSolver
Let
,
,
be multivariate polynomials in
,
i.e.,
[4]. The polynomial
optimization problem (POP) can be stated as follows:
Problem 1 (Polynomial optimization problem)
Since polynomial equalities can be expressed using
pairs of opposite inequalities,
i.e.,
POP encompasses all polynomial
optimization problems. In general, POP is an NP-hard
problem. In
[6],
Lasserre suggested to convexify POP using a hierarchy
of semidefinite (SDP) relaxations
,
Since the SDP problems
take the form of linear matrix
inequalities (LMI), the hierarchy is sometimes called
Lasserre’s LMI hierarchy and
is called a
LMI relaxation of
order
. The most agreeable property of
Lasserre’s hierarchy is the fact that the minima of
form a monotonically non-decreasing
sequence of the lower bounds on the global minimum of
Problem
1↑. Moreover, in most cases a
relaxation
,
exists such that its minimum is equal
to the global minimum of Problem
1↑.
Another optimization problem, closely related to POP,
is the polynomial matrix inequalities (PMI)
optimization problem:
Problem 2 (Polynomial matrix inequalities
optimization problem)
Here,
stands for the set of
symmetric matrices with polynomial
entries and the condition
means that the polynomial matrix
is positive semidefinite. Note that if
,
, Problem
2↑ becomes equivalent to
Problem
1↑,
i.e., POP is a subset of
PMI. Also note that if the polynomial degree of
and the maximal polynomial degree of
all the entries of
,
, is one, PMI becomes LMI. Even though
PMI is a strict superset of POP, it was shown
in
[5] that PMI is amendable
to solution using an LMI hierarchy analogous to the LMI
hierarchy for POP. GpoSolver implements solutions for
PMI, POP, and LMI problems. We refer to these problems
by the name of the largest problem set as PMI problems.
GpoSolver is a Matlab
toolbox/C++ library for solving POP and PMI problems
using the Lasserre’s LMI hierarchy approach. It aims at
situations where one wishes to repeatedly solve
instances of a specific PMI problem with coefficients
arising from concrete physical measurements. It
combines several advantages. It is able to solve and to
recover multiple global minima of both POP and PMI, it
does not need the Matlab environment in the problem
solving phase, it interfaces several SDP solvers, and
it is used as a C++ template library, i.e.,
there is no need for additional standalone executable.
Workflow
The purpose of GpoSolver is to provide a convenient
way to repeatedly solve PMI problems with a common
underlying structure. In the next, we will borrow
from the nomenclature of the object oriented
programming languages and call this underlying
structure a PMI class. A PMI class is a PMI
problem with unknowns of three kinds: problem
parameters, residual parameters, and
problem variables. A PMI instance is
then a PMI class where numerical values have been
substituted for the problem and residual parameters.
Specifically, PMI classes addressed by GpoSolver are
such that two different PMI instances of the same
class are identical up the coefficients of
and
, respectively.
Conceptually, using GpoSolver is
divided into two phases. The first phase is the
problem modeling phase and it is implemented as a
Matlab toolbox. The
second phase is the
problem solving phase and it
is implemented as a C++ template library. The following
figure depicts the GpoSolver’s workflow as well as the
relationship between the two phases:
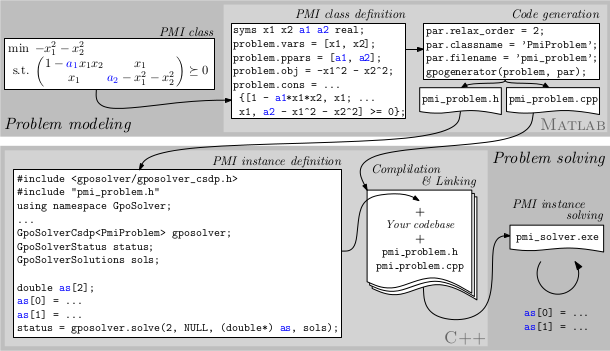
First, a PMI class is defined as a Matlab data structure. Next, based
on this data structure, a C++ class describing an LMI
relaxation of a given order is generated using
gpogenerator function of the toolbox. In the
problem solving phase, the generated C++ class,
together with the GpoSolver C++ template library, is
included into the user’s code. Finally, by simply
changing the values of the problem and residual
parameters, different instances of the original PMI
class can be solved. This two-phase approach has the
advantage of convenient problem modeling in
Matlab, while the final
executable can be deployed into a Matlab-free environment where
different instances of the original PMI class can be
repeatedly solved.
The
Matlab toolbox will
run on every
Matlab
supported platform provided that Symbolic Math Toolbox
with MuPAD engine is available. The C++ template
library is also platform agnostic, however, there are
several prerequisites as well. It is based on C++
linear algebra library
Eigen [1] and it needs to be
linked against at least one of these SDP solvers:
CSDP [3],
SDPA [7], or
MOSEK [2]. Both parts of
GpoSolver were tested on Ubuntu Linux 64-bit and
Windows 7 64-bit. GpoSolver is distributed as an
archive file containing the
Matlab toolbox, the C++ template
library, and the third party DLL libraries facilitating
the usage of GpoSolver under Windows 64-bit.
PMI class parametrization
Mathematically, PMI classes lead to problems that are
equivalent to Problem
2↑. However, not every aspect of
Problem
2↑ can be parametrized in GpoSolver
at the moment,
e.g., the number of constraints
must be fixed. The precise formulation of PMI classes
solvable by GpoSolver is stated by the following
problem:
Problem 3 (GpoSolver PMI class parametrization)
This parametrization allows for two sets of parameters
,
,
and for a summation-based cost
function. We call the parameters
problem parameters and they can
appear in the cost function as well as in the
constraints. The values of these parameters are to be
specified during the problem solving phase, however,
the number of problem parameters
needs to be specified in the modeling
phase. The second set of parameters
,
we call residual parameters.
Again, the number of parameters
must be specified in the modeling
phase. The values of the residual parameters as well as
the number of the parameter blocks
are instance specific. The
instance-specific parameter
together with the summation-based cost
function allow for PMI classes based on minimization of
residual based cost functions. In the modeling phase,
only the form of
must be specified. If the problem
contains no residual parameters, then
by default. To sum it up, the values
of
,
,
,
and
need to be specified in the modeling
phase. The parameter values as well as the number of
residual blocks
are instance dependent and are to be
specified in the solving phase.
Another constraint on a PMI class is the requirement
that both
and
must be polynomials in the problem
variables
as well as in the parameters
This means that the parameters
can appear as monomials only. If the
problem at hand calls for more complicated functions
such as
,
,
, etc., the user must substitute these
using new variables in the modeling phase manually. In
the solving phase, one must also take care of correctly
“pre-computing” the values of these new variables. The
reason behind this constraint is the fact that
polynomial functions are easy to translate into C++
code and are defined for all real values.
References
[1]
Eigen: C++ template
library for linear algebra.
[2]
MOSEK: large scale optimization
software.
[3]
Brian Borchers.
CSDP, A library
for semidefinite programming. Optimization methods and
Software, 11(1-4):613—623, 1999.
[4]
D.A. Cox, J.B. Little, D.
O'Shea. Using
Algebraic Geometry. Springer, 2005. URL
http://books.google.com/books?id=1blxizOS9N0C.
[5]
Didier Henrion, Jean-Bernard
Lasserre. Convergent
relaxations of polynomial matrix inequalities and
static output feedback. Automatic Control, IEEE Transactions
on, 51(2):192—202, 2006.
[6]
Jean-Bernard Lasserre.
Global Optimization with
Polynomials and the Problem of Moments.
SIAM Journal on
Optimization, 11:796—817, 2001.
[7]
Katsuki Fujisawa Makoto
Yamashita. A
high-performance software package for semidefinite
programs: SDPA 7.
2010.