Multi-Camera Self-Calibration
Matlab package for a complete and fully automatic
calibration of multi-camera setups (3 cams min). A standard laser
pointer is the only hardware you need. No calibration object and user
interaction required.
Keywords: multiple cameras calibration, multicamera calibration,
selfcalibration, multi-camera calibration, calibration of a camera
network.
Authors of the code
-
Tomas
Svoboda. Corresponding author. Design of the package,
Euclidean stratification, Finding points, I/O operations, interfacing,
robust reconstruction for calib validations ...
-
Daniel Martinec and Tomas Pajdla. Filling
points in projective reconstruction via rank-4 factorization.
-
Jean-Yves
Bouguet. Radial distortion routines.
-
Tomas Werner. Projective
Bundle Adjustment.
-
Ondrej Chum. RANSAC implementation
History
- February, 2011. Code slightly modified and made Octave compatible by Andrew Straw and his collaborators. See the readme for more details. Thanks Andrew!
-
May 24, 2005. Version 1.0 released.
-
October 29, 2004. Sample data available for download.
-
July 15, 2004. Our journal paper accepted.
-
20 August, 2003. Documentation upgrade.
-
30 July, 2003. Release Candidate 2.
-
18 July, 2003. First public release candidate.
-
Early spring of 2002. First really working version of the linear model
estimation. Then testing, upgrading, testing, upgrading, testing, ...
Downloads
Send an email to Tomas Svoboda, svoboda_at_cmp.felk.cvut.cz if you
would like to receive announcements about upgrades. Please write
SelfCal to the Subject field. Any suggestions, bug-reports are
welcome.
The code has been tested on several Linux machines and different
version of the Matlab
package.
Warranty, Support, Condition of Use
The software is offered as is. The use is free. Essential
modifications of the code (not config changes) and their
re-distribution must approved by me. Please use the artictle
in the Presence journal as the reference.
Publications and Documentation
-
Tomas Svoboda. A Software for Complete Calibration of MultiCamera Systems. Talk given at MIT CSAIL. Jan 25, 2005. [Slides PDF | Printout PDF]
-
Tomas Svoboda, Daniel Martinec, and Tomas Pajdla. A convenient multi-camera self-calibration for virtual environments.
PRESENCE: Teleoperators and Virtual Environments, pp 407-422, 14(4), August
2005. MIT Press
Manuscript of the journal article [PDF, 1.7MB]. Its bib-entry.
-
Early version of the TR-users guide. [PDF], [Version from 20 August, 2003]. The more downloads and feedback the
harder I will work on upgrades and documentation :-) I can provide some test data on request.
-
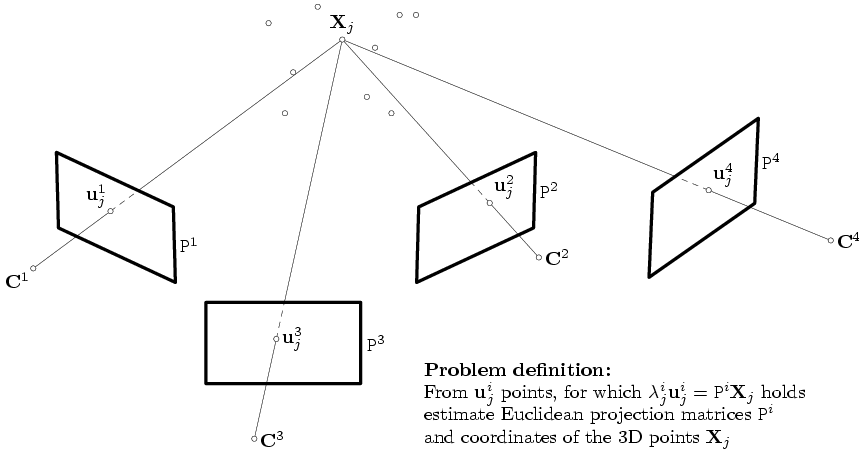
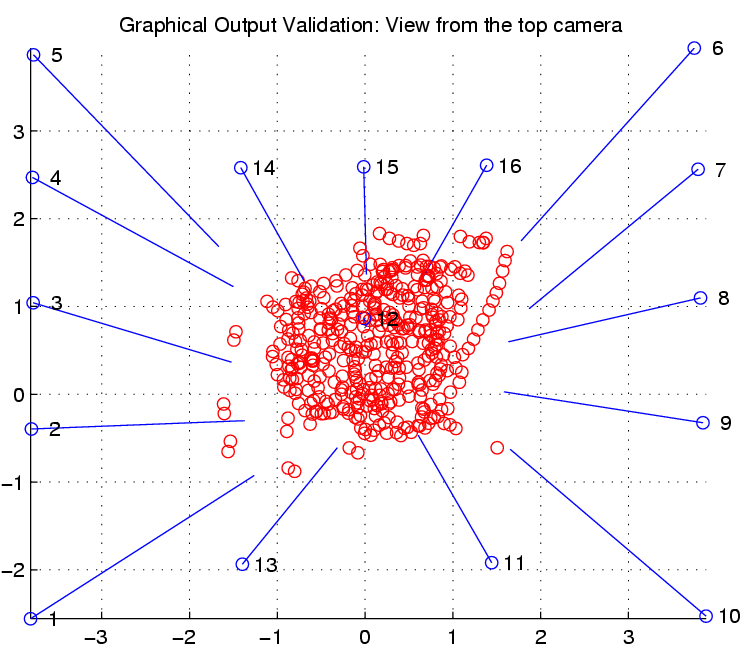
Graphical sketch of the self-calibration problem.
-
Short description of the output parameters.
-
Short video [avi, DivX]
showing calibration of our mobile ViRoom
setup in a factory.
Links
-
Camera Calibration toolbox
for Matlab. The radial distortion routines from this package are used
in our self-calib package.
-
Demo page about
Projective 3D-reconstruction from Perspective Images with Occlusions
and Outliers.
-
MultiCam project.
-
[ Blue-C | ViRoom ] projects.
Maintainer: Tomas Svoboda
![[CNW:Counter]](http://counter.cnw.cz/arial.cgi?SelfCal&7&000000&FFFFFF&on) hits since August 5, 2003.
hits since August 5, 2003.