In [4], they discovered a decalibration on a highway sequence from the KITTI dataset [44]. The segment in question is Sequence 01 from the odometry dataset (2011_10_03_drive_0042_sync in raw data). We have analyzed this case thoroughly. Some of the results are reported only in here, and the main finding is included in Section VI.D.
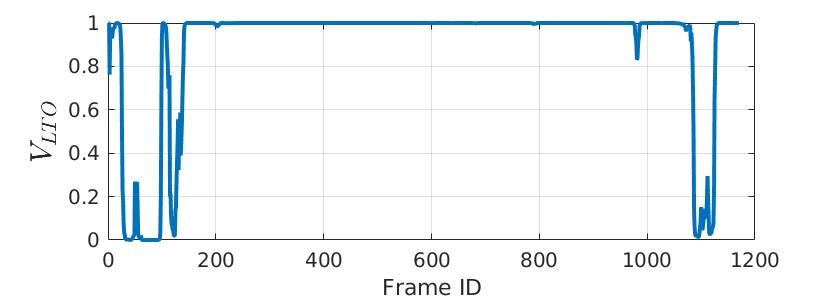
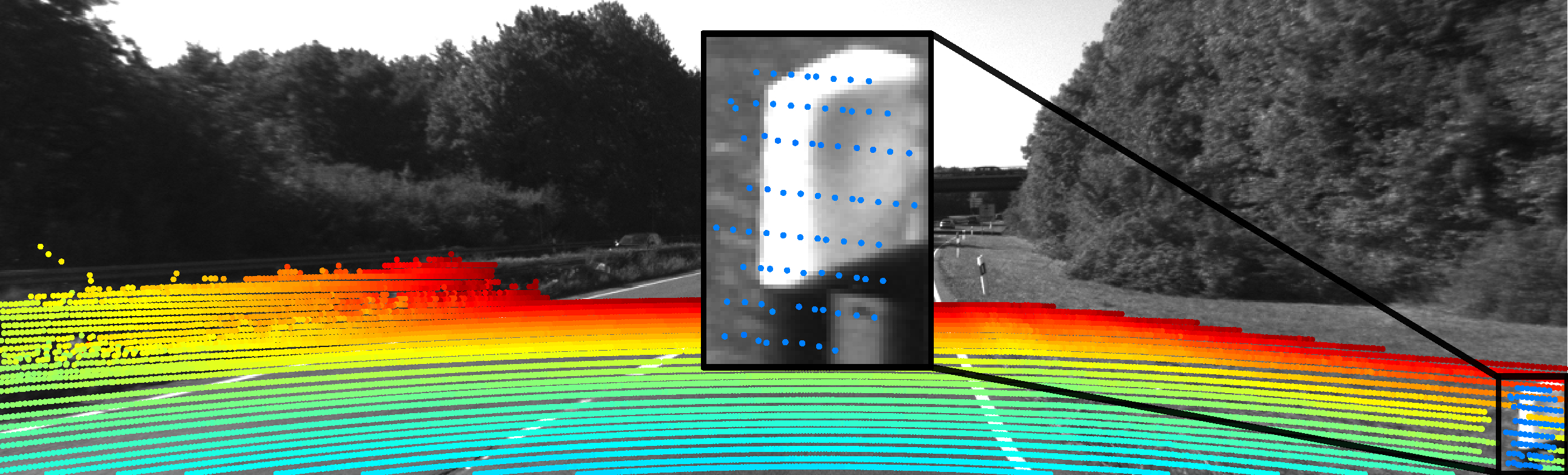
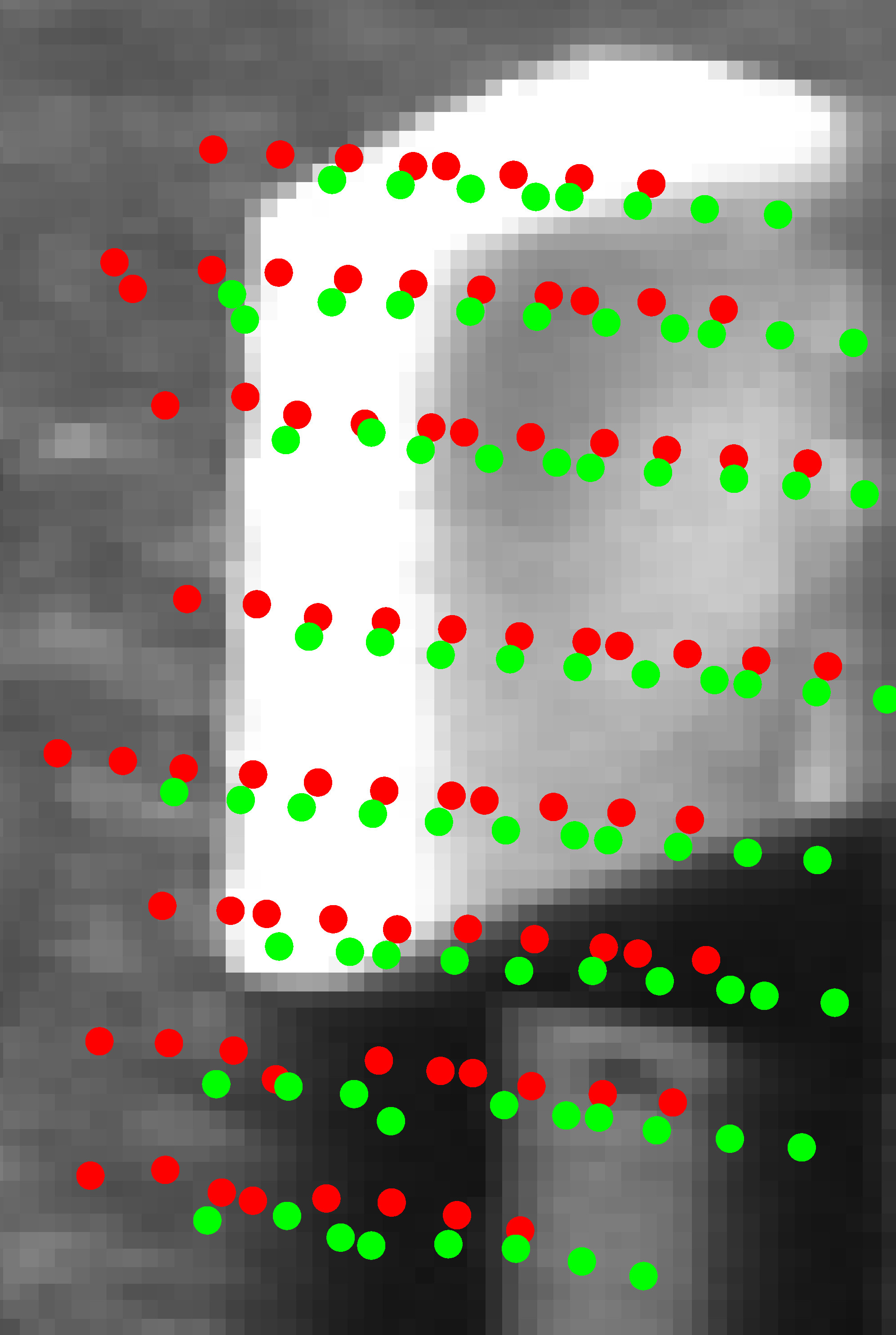
We computed the LTO calibration validity index on this sequence. The result is shown in Fig. 1. The plot shows a detected decalibration on similar parts (start and end) of the sequence as in the reference [4]. The pointcloud projection onto the image plane of Camera 0 (see Fig. 2) suggests that there might be some actual decalibration between the LiDAR and the camera on this frame from the beginning of the sequence. Although we did find a medium Spearman rank correlation of -0.45 between the validity index and the forward acceleration of the vehicle, we cannot make any strong conclusions on the cause of the decalibration. We believe, there are other possible explations of this behaviour besides the actual decalibration of rotational parameters due to the forces.
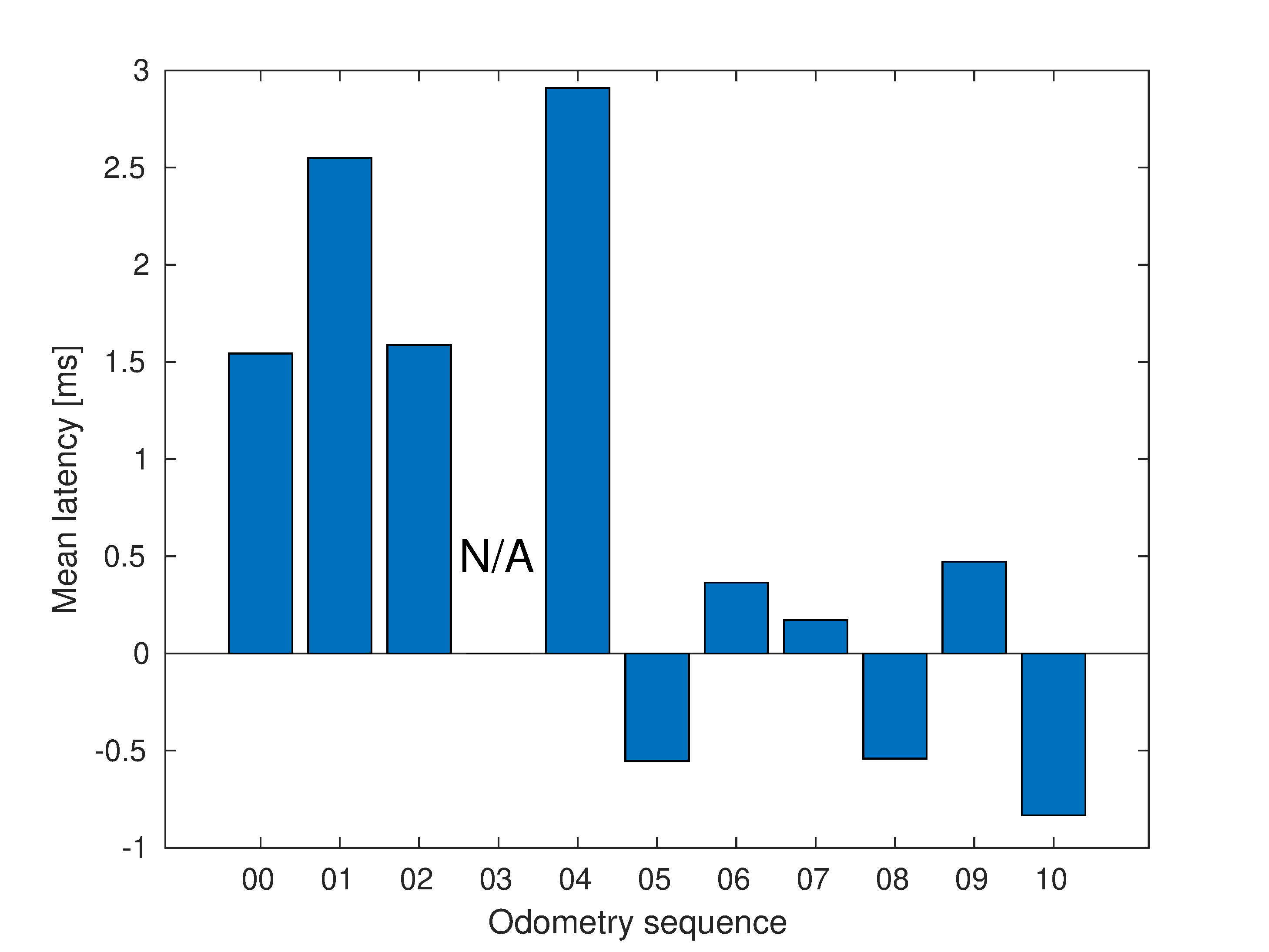
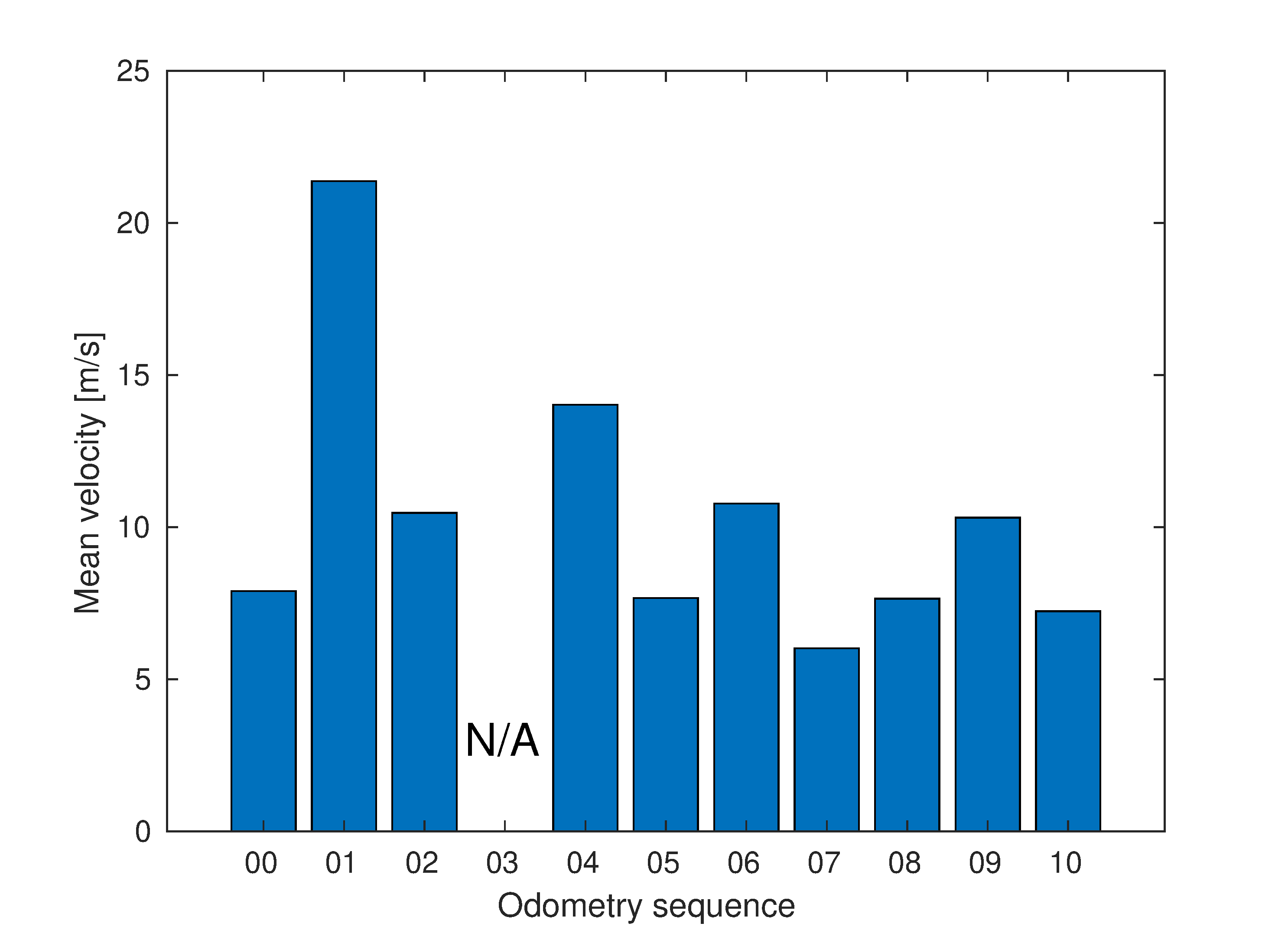
For example, in the case of LiDARs with cameras, the effect of uncompensated relative latency might have influence in combination with the high velocity on the highway. For each KITTI odometry dataset sequence (besides 03, which is not available in the raw dataset anymore), we ran an optimisation procedure on the loss function (see Eq. (3)) that estimated the relative latency. The results are shown in Fig. 3. One can see that Sequences 01 and 04 exhibited the largest mean latency (the latency is changing dynamically throughout each sequence). We have also ploted the velocity based on the IMU data in Fig. 4. One can see that the highway sequence has the highest mean velocity and a very high latency. This combination could lead to some decalibration on particular parts of the sequence. Fig. 5 shows that latency compensation by 5 ms fixed the error (seen above in Fig. 2) of LiDAR points projection on the bollard.
[4] I. Cvisic, I. Markovic, and I. Petrovic, "SOFT2: Stereo visual odometry for road vehicles based on a point-to-epipolar-line metric," IEEE Transactions on Robotics, vol. 39, no. 1, p. 273-288, 2023.
[44] A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, "Vision meets robotics: The KITTI dataset," International Journal of Robotics Research, vol. 32, no. 11, p. 1231-1237, 2013.