|
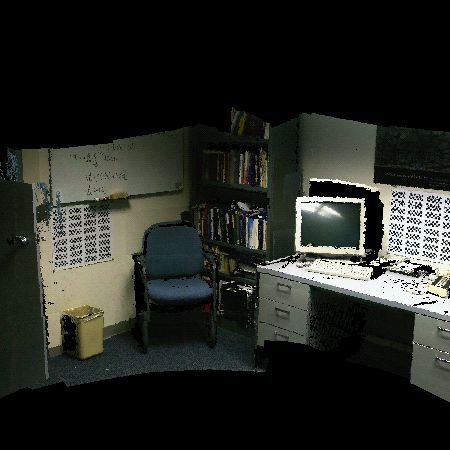
| A wide-angle view of the scene. Two cameras of the stereohead are visible in the foreground. |
|---|
Radim Sara and Ruzena Bajcsy
GRASP Laboratory, Department of Computer Science, University
of Pennsylvania
sara@cmp.felk.cvut.cz,
http://cmp.felk.cvut.cz/~sara/home.html
|
|
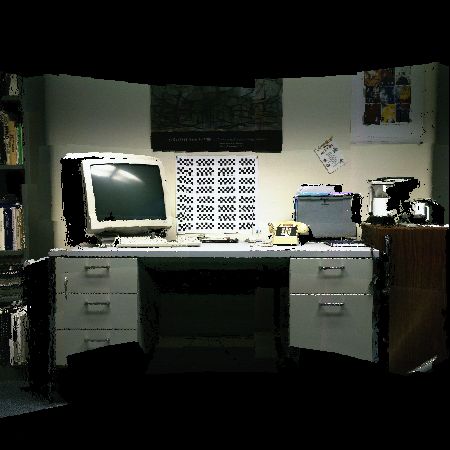
| A wide-angle view of the scene. Two cameras of the stereohead are visible in the foreground. |
|---|
|
|

|

|

|

|
|
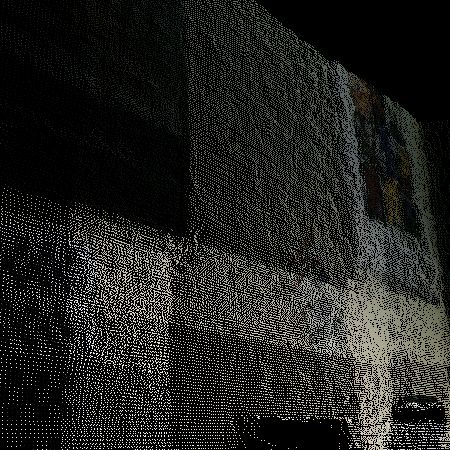
The data contain two sets of images of exactly the same scene, one with natural surface texture and one with enforced (projected) random texture. Reconstructions from natural images can be compared against reconstructions from ideal images.
The reconstructed scene is a collection of colored isolated points in Euclidean space, each point is a six-tuple [x, y, z, r, g, b], see Reconstruction Datafiles.
In addition to the reconstructed scene, we can provide all the camera calibration parameters and all the motion parameters but we can also provide all the images, including those used for camera calibration and motion estimation. We can provide calibration, motion estimation, and reconstruction procedures we used (in Matlab and C code).
All of this will be available soon. Stay tuned.