#include <RealCamera.hpp>
Public Member Functions | |
| virtual TableP2ConstPtr | getCachedPositions ()=0 |
| virtual sensor_msgs::CameraInfoConstPtr | getCameraInfo ()=0 |
| virtual sensor_msgs::ImageConstPtr | getImage ()=0 |
| virtual float | getWeight (int row, int col)=0 |
| virtual bool | isReady ()=0 |
| virtual void | setCameraInfo (const sensor_msgs::CameraInfoConstPtr &camInfo)=0 |
| virtual void | setPointsCache (std::string frame, const TableV3Ptr &points)=0 |
| virtual void | updateImage (const sensor_msgs::ImageConstPtr &image)=0 |
| virtual bool | validateCache ()=0 |
| virtual | ~RealCamera () |
Static Public Attributes | |
| static const int | NOT_VISIBLE = -1 |
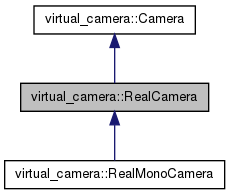
Interface for all real cameras. These cameras encapsulate the cameras that physically exist in the system. They are able to provide data about points in space that are observable from these real cameras.
Definition at line 30 of file RealCamera.hpp.
| virtual virtual_camera::RealCamera::~RealCamera | ( | ) | [inline, virtual] |
Definition at line 39 of file RealCamera.hpp.
| virtual TableP2ConstPtr virtual_camera::RealCamera::getCachedPositions | ( | ) | [pure virtual] |
Via setPointsCache() you can precompute positions you are interested in. Via this function you can get the results.
Implemented in virtual_camera::RealMonoCamera.
| virtual sensor_msgs::CameraInfoConstPtr virtual_camera::RealCamera::getCameraInfo | ( | ) | [pure virtual] |
Implements virtual_camera::Camera.
Implemented in virtual_camera::RealMonoCamera.
| virtual sensor_msgs::ImageConstPtr virtual_camera::RealCamera::getImage | ( | ) | [pure virtual] |
Implemented in virtual_camera::RealMonoCamera.
| virtual float virtual_camera::RealCamera::getWeight | ( | int | row, |
| int | col | ||
| ) | [pure virtual] |
Weights the position so that position near the center of the camera has higher weight than those near edges.
| int | row index in the position cache |
| int | col index in the position cache |
Implemented in virtual_camera::RealMonoCamera.
| virtual bool virtual_camera::RealCamera::isReady | ( | ) | [pure virtual] |
Implemented in virtual_camera::RealMonoCamera.
| virtual void virtual_camera::RealCamera::setCameraInfo | ( | const sensor_msgs::CameraInfoConstPtr & | camInfo | ) | [pure virtual] |
Updates the cameras configuration via the camera info. const sensor_msgs::CameraInfoConstPtr & camInfo
Implemented in virtual_camera::RealMonoCamera.
| virtual void virtual_camera::RealCamera::setPointsCache | ( | std::string | frame, |
| const TableV3Ptr & | points | ||
| ) | [pure virtual] |
Passes precomputed points in the specified frame to the camera. The camera is then able to precompute lookup table with projections of those points onto the image plane.
| std::string | frame tf frame where the points are located const TableV3Ptr & points |
Implemented in virtual_camera::RealMonoCamera.
| virtual void virtual_camera::RealCamera::updateImage | ( | const sensor_msgs::ImageConstPtr & | image | ) | [pure virtual] |
Immediately updates this cameras image.
| const | sensor_msgs::ImageConstPtr & image |
Implemented in virtual_camera::RealMonoCamera.
| virtual bool virtual_camera::RealCamera::validateCache | ( | ) | [pure virtual] |
Validates the cache of this camera so it is up to date.
Implemented in virtual_camera::RealMonoCamera.
const int virtual_camera::RealCamera::NOT_VISIBLE = -1 [static] |
Cached positions that are not seen by the camera are assigned this value.
Definition at line 36 of file RealCamera.hpp.

