An RGB-D dataset and evaluation methodology for detection and 6D pose estimation of texture-less objects
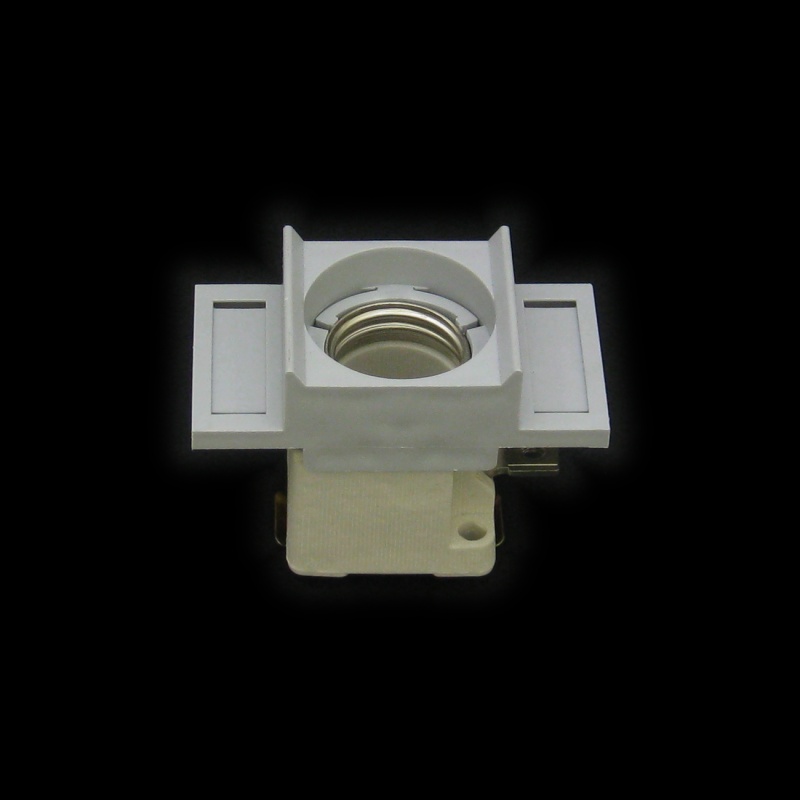
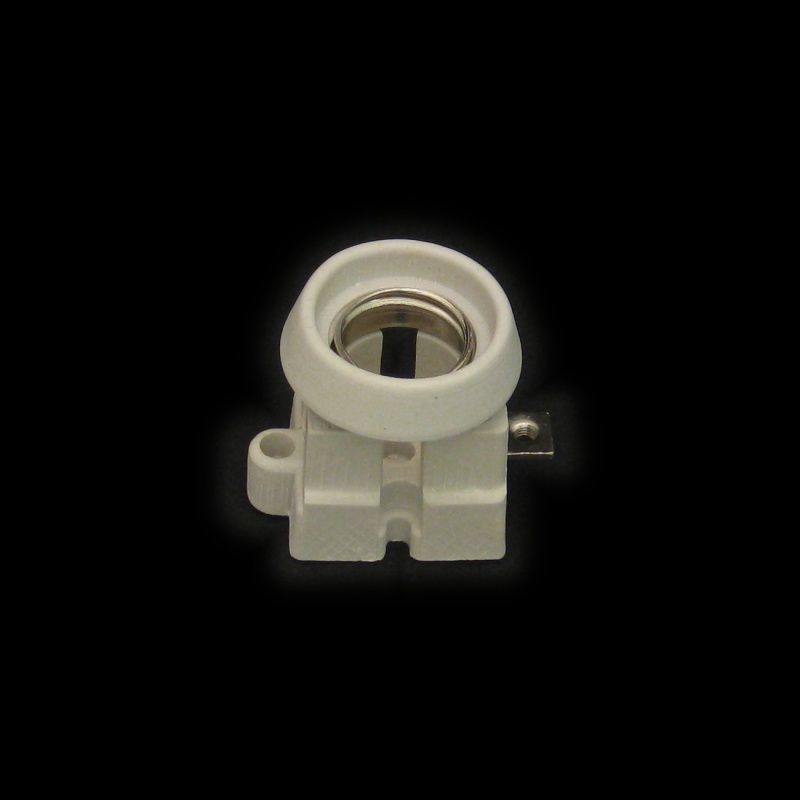
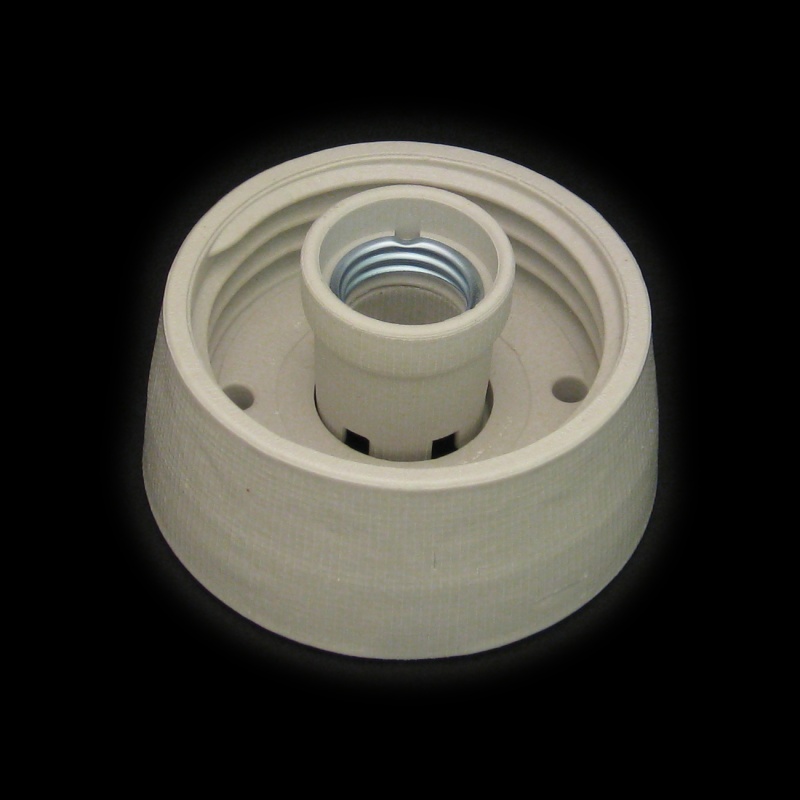
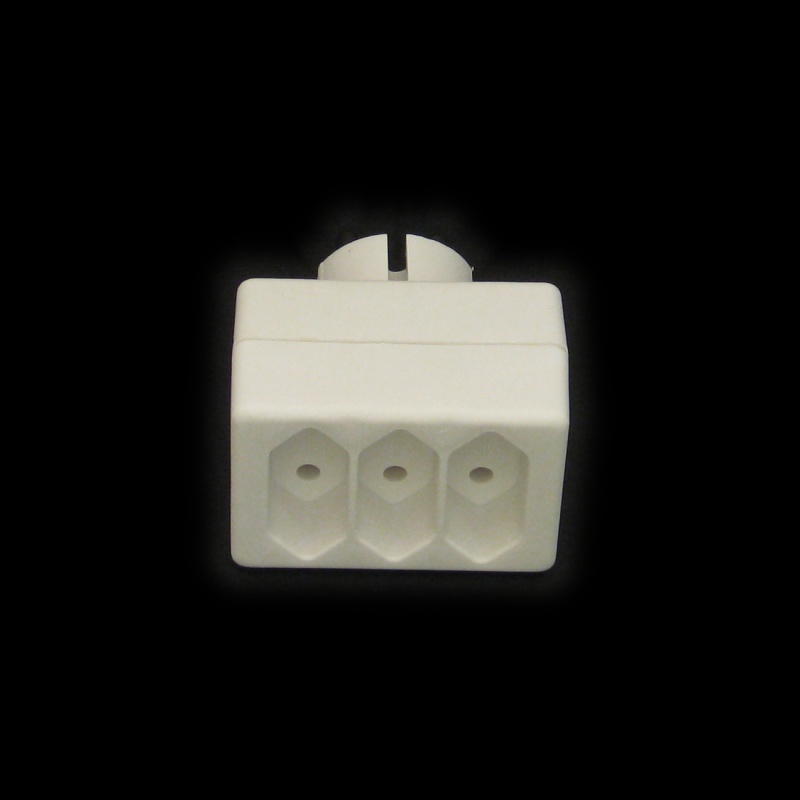
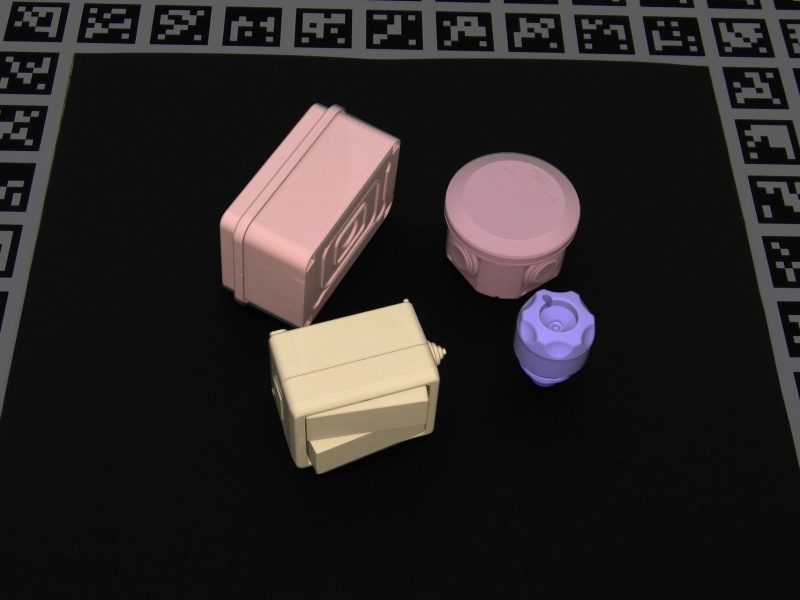
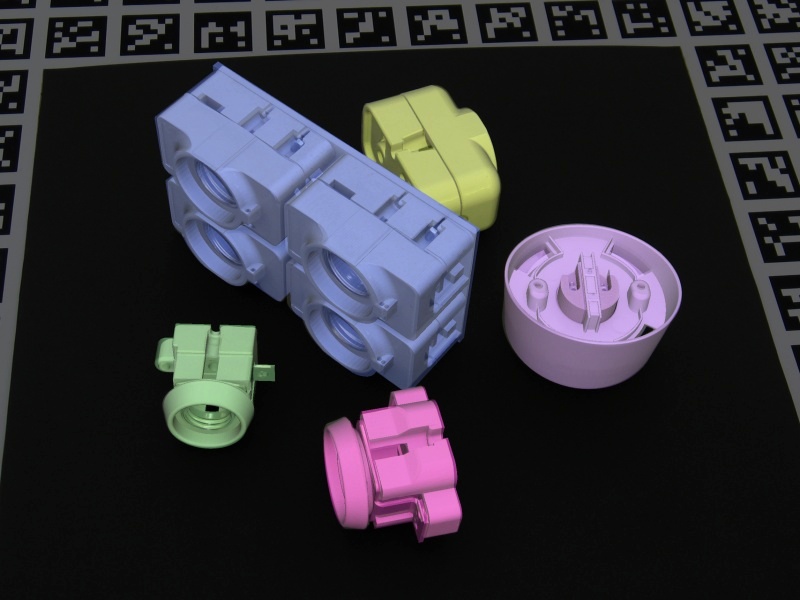
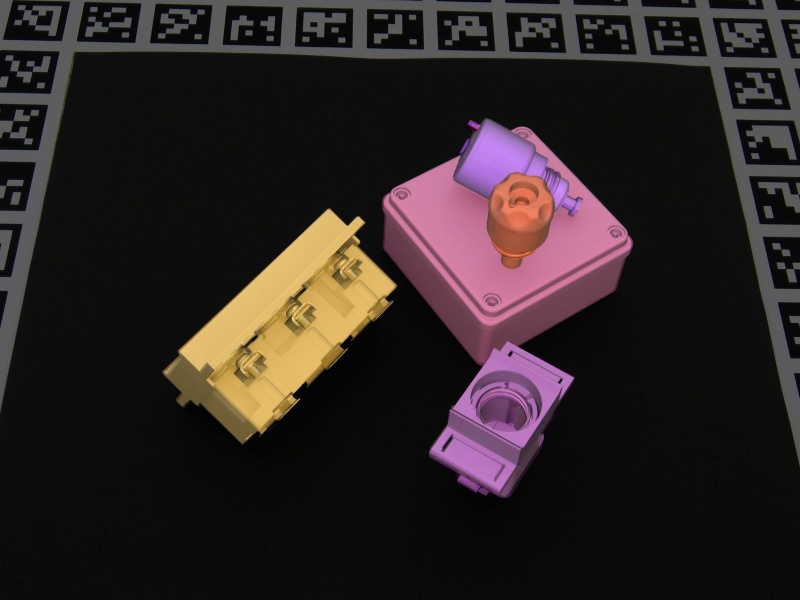
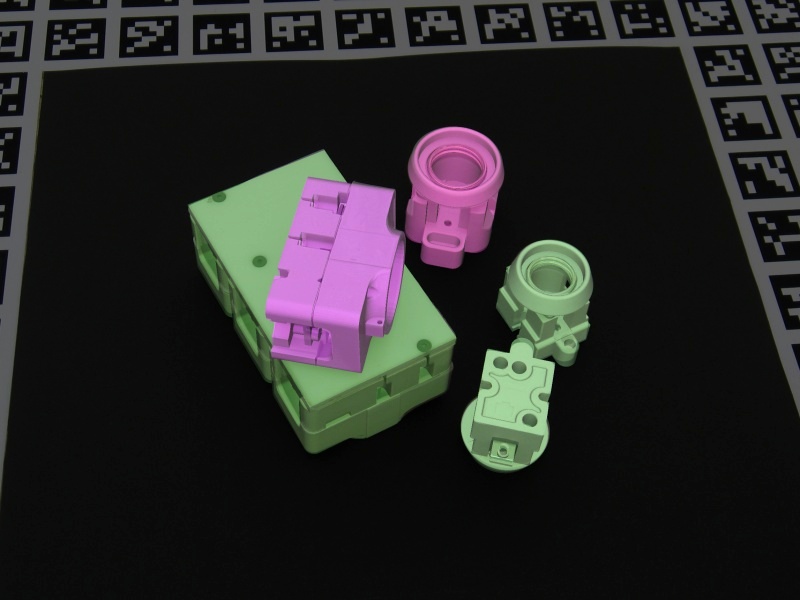
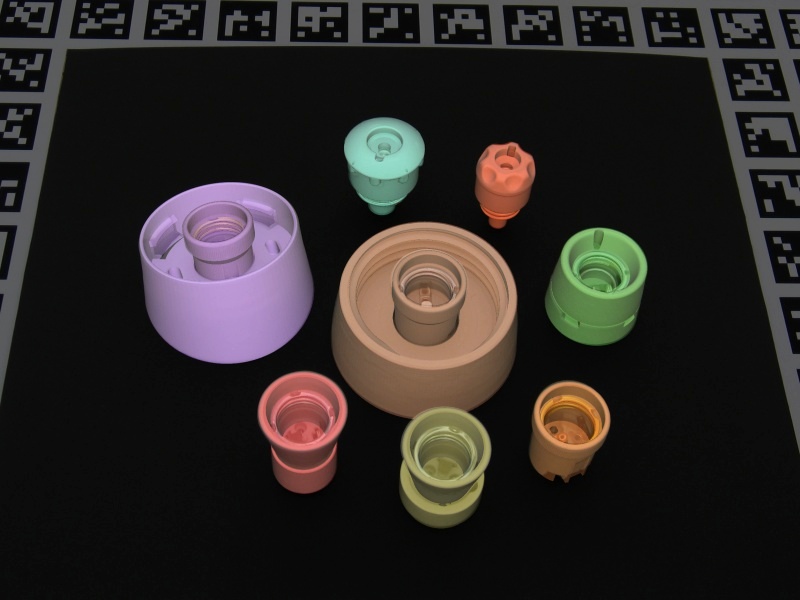
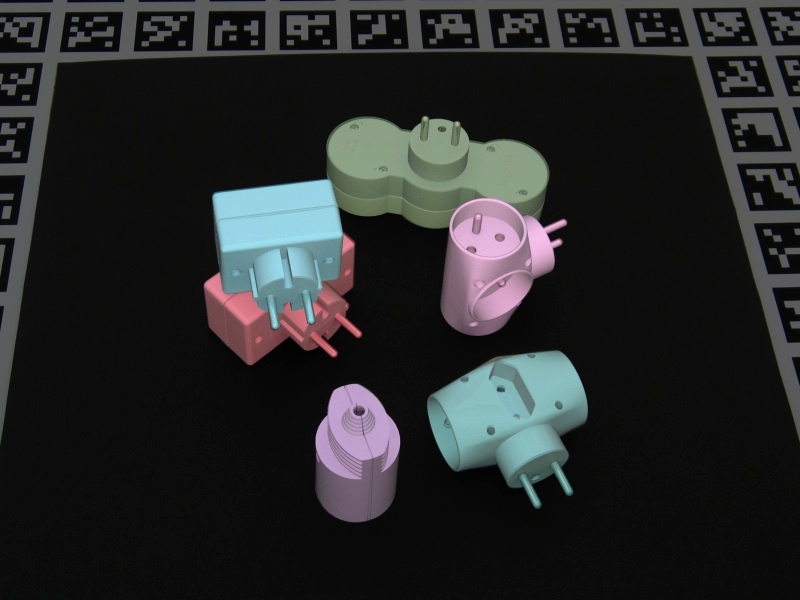
- 30 industry-relevant objects: no discriminative color, no texture, often similar in shape, some objects are parts of others.
- Three synchronized sensors used to capture the training and test images: Primesense CARMINE 1.09 (a structured-light RGB-D sensor), Microsoft Kinect v2 (a time-of-flight RGB-D sensor), and Canon IXUS 950 IS (a high-resolution RGB camera).
- Training images (38K from each sensor) depict individual objects against a black background.
- Test images (10K from each sensor) originate from 20 test scenes. The scene complexity varies from simple scenes with several isolated objects to very challenging ones with multiple object instances and a high amount of clutter and occlusion.
- Two types of 3D models for each object: a manually created CAD model and a semi-automatically reconstructed one.
- A new evaluation methodology which deals with pose ambiguity that can be caused by object symmetries and occlusions.
Please cite the following paper if you use the dataset. This work is licensed under Creative Commons Attribution 4.0 International.
- 05/Jun/2020 - New photorealistic training images generated by BlenderProc4BOP for the BOP Challenge 2020.
- 03/Jul/2018 - T-LESS included in the BOP benchmark for 6D object pose estimation.
- 06/May/2017 - T-LESS included in the SIXD challenge 2017.
- 28/Mar/2017 - T-LESS presented at WACV 2017 in Santa Rosa.
- 19/Jan/2017 - A paper about T-LESS is available on arXiv.
- 23/Sep/2016 - The first complete version (v2) of the dataset is released.
- 16/Mar/2015 - A preview version (v1) of the dataset is available.
 1 1 |
 2 2 |
 3 3 |
 4 4 |
 5 5 |
 6 6 |
 7 7 |
 8 8 |
 9 9 |
 10 10 |
 11 11 |
 12 12 |
 13 13 |
 14 14 |
 15 15 |
 16 16 |
 17 17 |
 18 18 |
 19 19 |
 20 20 |
 21 21 |
 22 22 |
 23 23 |
 24 24 |
 25 25 |
 26 26 |
 27 27 |
 28 28 |
 29 29 |
 30 30 |
Objects included in the dataset. Each object is captured from a systematically sampled view sphere - with 10° step in elevation (from 85° to -85°) and 5° step in azimuth.
 1 1 |
 2 2 |
 3 3 |
 4 4 |
 5 5 |
 6 6 |
 7 7 |
 8 8 |
 9 9 |
 10 10 |
 11 11 |
 12 12 |
 13 13 |
 14 14 |
 15 15 |
 16 16 |
 17 17 |
 18 18 |
 19 19 |
 20 20 |
Sample test images. The images are overlaid with colored 3D object models at the ground truth poses. Each test scene is captured from a systematically sampled view hemisphere - with 10° step in elevation (from 75° to 15°) and 5° step in azimuth.