Z. Kukelova, M. Bujnak, and T. Pajdla. Polynomial eigenvalue solutions to minimal problems in computer vision.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 34(7):1381-1393, July 2012. PDF
Many problems in computer vision require efficient solvers for solving systems of non-linear polynomial equations. For instance relative and absolute camera pose computations and estimation of the camera lens distortion are examples of problems that can be formulated as minimal problems, i.e. they can be solved from a minimal number of input data and lead to solving systems of polynomial equations with a finite number of solutions. Often, polynomial systems arising from minimal problems are not trivial and general algorithms for solving systems of polynomial equations are not efficient for them. Therefore, special algorithms have to be designed to achieve numerical robustness and computational efficiency. In this thesis we review two general algebraic methods for solving systems of polynomial equations, the Groebner basis and the resultant based methods, and suggest their modifications, which are suitable for many computer vision problems. The main difference between the modified methods and the general methods is that the modified methods use the structure of the system of polynomial equations representing a particular problem to design an efficient specific solver for this problem. These modified methods consist of two phases. In the first phase, preprocessing and computations common to all considered instances of the given problem are performed and an efficient specific solver is constructed. For a particular problem this phase needs to be performed only once. In the second phase, the specific solver is used to efficiently solve concrete instances of the particular problem. This efficient specific solver is not general and solves only systems of polynomial equations of one form. However, it is faster than a general solver and suitable for applications that appear in computer vision and robotics. Construction of efficient specific solvers can be easily automated and therefore used even by non-experts to solve technical problems leading to systems of polynomial equations. In this thesis we propose an automatic generator of such efficient specific solvers based on the modified Groebner basis method. We demonstrate the usefulness of our approach by providing new, efficient and numerical stable solutions to several important relative pose problems, most of them previously unsolved. These problems include estimating relative pose and internal parameters of calibrated, partially calibrated (with unknown focal length), or completely uncalibrated perspective or radially distorted cameras observing general scenes or scenes with dominant plane. All these problems can be efficiently used in many applications such as camera localization, structure-from-motion, scene reconstruction, tracking and recognition. The quality of all presented solvers is demonstrated on synthetic and real data.



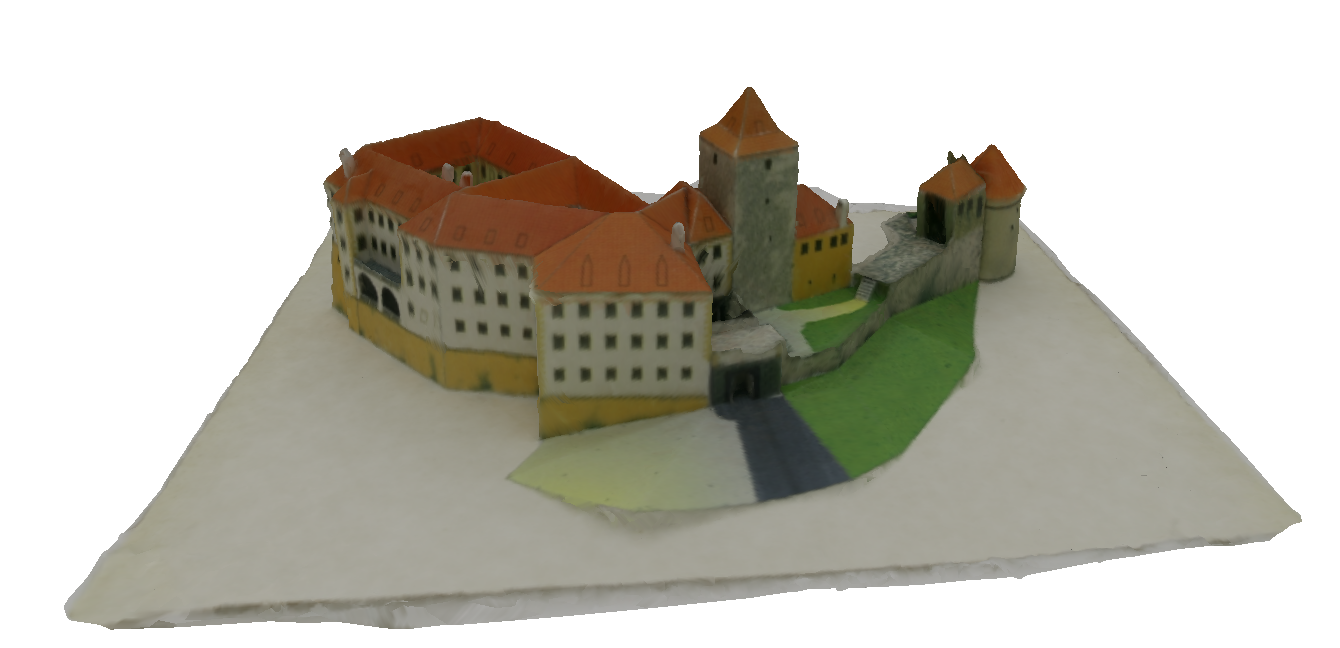



Dense 3D reconstruction of a paper model of Daliborka
Copyright Capturing reality
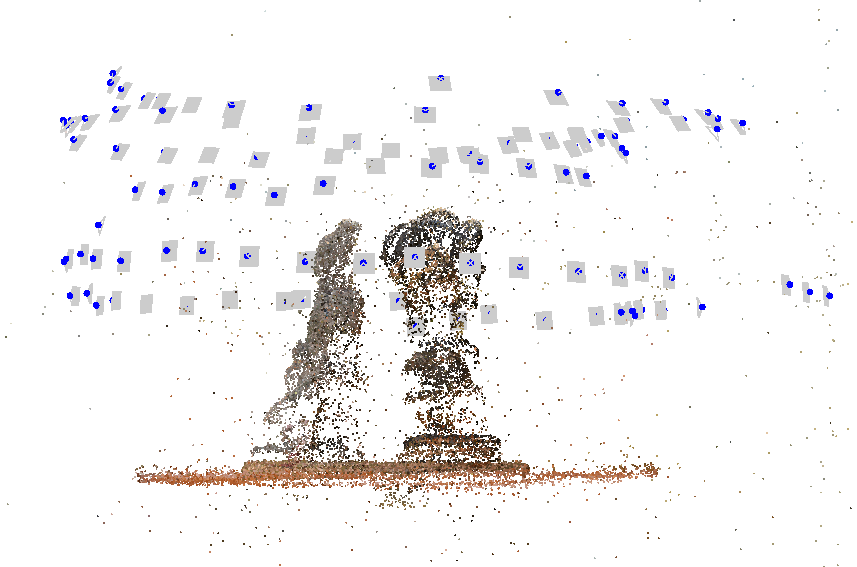
3D reconstruction obtained from images taken by Gopro camera with strong radial distortion with combination of images taken by standard camera
Copyright Capturing reality
IEEE Transactions on Pattern Analysis and Machine Intelligence, 34(7):1381-1393, July 2012. PDF
IEEE Transactions on Pattern Analysis and Machine Intelligence, 33(12):2410-2422, December 2011. PDF
Computer Vision and Image Understanding, 114(2):234-244, February 2010. PDF
Included in the thesis
In 10th Asian Conference on Computer Vision (ACCV'10 Workshop), Lecture Notes in Computer Science 2011. PDF
In IEEE International Conference on Computer Vision (ICCV'09), pages 1803-1810, 2009. PDF, Video
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'08), Vols 1-2, pages 234-244, 2008. PDF
In British Machine Vision Conference (BMVC'08), 2008. PDF
In 10th European Conference on Computer Vision (ECCV'08), Lecture Notes in Computer Science, 2008. PDF
In 7th Workshop on Omnidirectional Vision, Camera Networks and Non-classical Cameras (OMNIVIS'07), 2007. PDF
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'07), 2007. PDF
In Computer Vision Winter Workshop (CVWW'07), Graz, Austria, 2007. PDF
Conference papers realted to the thesis
In IEEE International Conference on Computer Vision (ICCV'13), Sydney, Australia, 2013. PDF
In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference (AMOS'13), 2013. PDF
In International conference on 3d vision (3DV'13), Seattle, USA, June, 2013. PDF
IIn 11th Asian Conference on Computer Vision (ACCV'12), 2012. PDF, Code
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'12), 2012. PDF
In 10th Asian Conference on Computer Vision (ACCV'10), volume 6492 of Lecture Notes in Computer Science, pages 11-24, 2011. PDF
In 10th Asian Conference on Computer Vision (ACCV'10), volume 6493 of Lecture Notes in Computer Science, pages 216-229, 2011. PDF
In 9th Asian Conference on Computer Vision (ACCV'09), pages 13-24, 2009. PDF
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'08), Vols 1-12, pages 3506-3513, 2008. PDF
Karlovo namesti 13, 121-35 Praha 2,
Czech Republic
Tel.: +420-224-355-725
Fax: +420-224-357-385
ICQ: 213-365-550
E-mail: kukelova(at)cmp.felk.cvut.cz
Center for Machine
Perception
Department of
Cybernetics
Faculty of
Electrical Engineering
Czech
Technical University in Prague