Z. Kukelova, M. Bujnak, and T. Pajdla. Polynomial eigenvalue solutions to minimal problems in computer vision.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 34(7):1381-1393, July 2012. PDF
Počítačové vidění vyžaduje schopnost efektivně řešit systémy polynomiálních rovnic. Například určování relativní nebo absolutní polohy kamery, lze formulovat jako minimální problémy, tedy je lze řešit z minimálního počtu vstupních dat. Minimální problémy vedou na systémy polynomiálních rovnic s konečným počtem řešení. Systémy vycházející z minimálnich problémů jsou často komplikované a obecné algoritmy k řešení systémů polynomiálních rovnic pro ně vedou na relativně neefektivní řešení. Proto je pro řešení těchto problémů obvykle zapotřebí navrhnout numericky robustní a výpočetně efektivní specifické algoritmy. V této disertaci navrhujeme modifikace dvou standartních algebraických technik pro řešení systémů polynomiálnich rovnic a to metody založené na Gröbnerových bázích a metody založené na rezultantech, které jsou vhodné právě pro efektivní řešení mnoha problémů v počítačovém vidění a jiných oblastech. Základní rozdíl mezi prezentovanými specializovanými metodami a standartními obecnými metodami je, že prezentované specializované metody využívají znalosti struktury systému polynomiálních rovnic, který reprezentuje konkrétní problém k návrhu efektivního a stabilního algoritmu na řešení tohoto problému. Při tomto návrhu se část výpočtů společná pro všechny instance daného problému připraví předem, což ušetří čas při opakovaném řešení systémů s identickou strukturou. Takto vytvořený algoritmus není obecným algoritmem a řeší jen systémy polynomiálních rovnic jednoho tvaru, avšak je rychlejší než obecné algoritmy a proto je vhodný pro aplikace, které se objevují například v počítačovém vidění. Obě navržené specializované metody mohou být snadno zautomatizovány a takto používány i neodborníky k řešení problémů vedoucích na systémy polynomiálnich rovnic. V této disertaci prezentujeme automatický generátor efektivních algoritmů založený na modifikované metodě Gröbnerových bázi. Jako ukázku užitečnosti obou navržených metod a našeho automatického generátoru v této disertaci prezentujeme nová efektivní a numericky stabilní řešení několika velmi důležitých problémů určování relativní polohy kamer. Většina těchto problémů nebyla v minulosti vyřešena. Mezi těmito problémy jsou problémy určování relativní polohy a kalibračních parametrů kalibrovaných, částečně kalibrovaných (s neznámou ohniskovou vzdáleností) nebo kompletně nekalibrovaných perspektivních kamer či kamer s radiálním zkreslením snímajících obecnou scénu nebo scénu s dominující rovinou. Všechny tyto algoritmy mohou být efektivně použity v aplikacích jako je lokalizace, rekonstrukce 3D scény či rozpoznávání. Kvalita prezentovaných algoritmů je demonstrována experimenty na syntetických i reálných datech



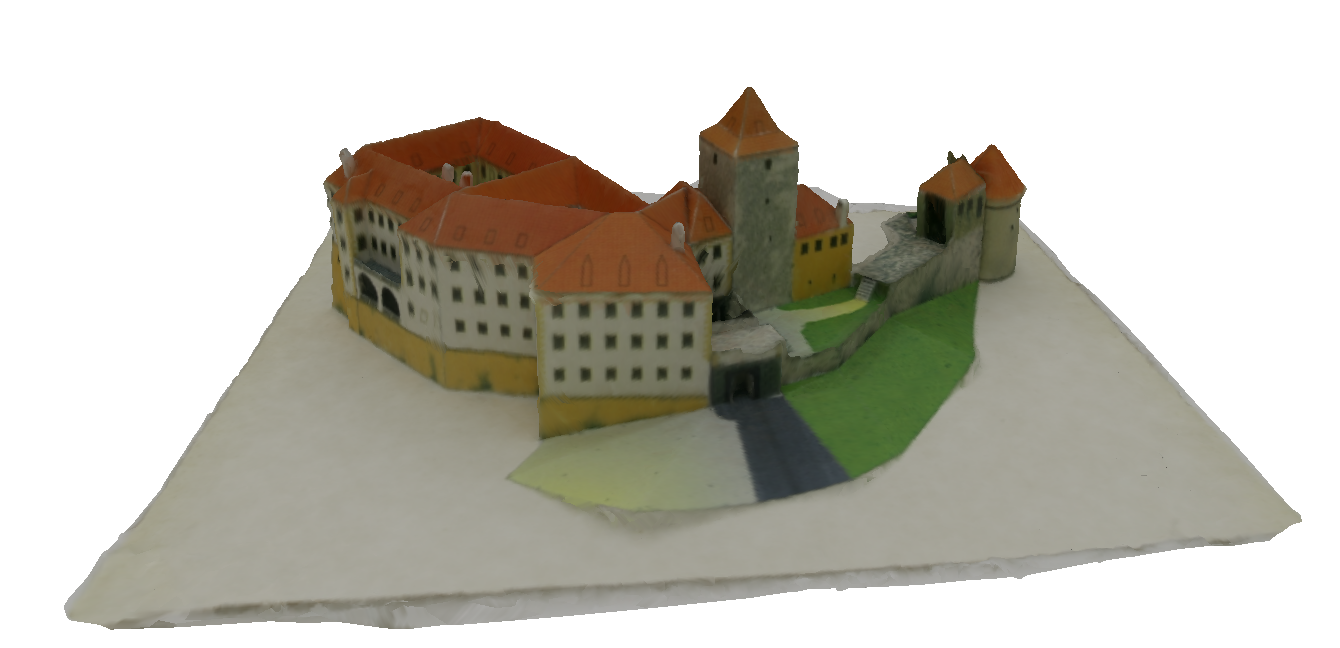



Hustá 3D rekonstrukce papírového modelu Daliborky
Copyright Capturing reality
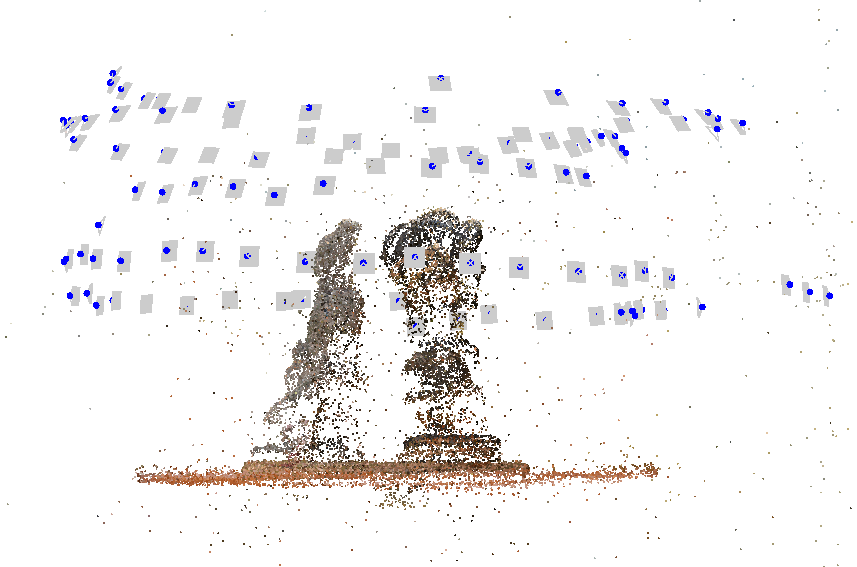
3D reconstrukce získána z obrázků z Gopro kamery se značným radiálním skreslením a obrázků pořízených standartní kamerou.
Copyright Capturing reality
IEEE Transactions on Pattern Analysis and Machine Intelligence, 34(7):1381-1393, July 2012. PDF
IEEE Transactions on Pattern Analysis and Machine Intelligence, 33(12):2410-2422, December 2011. PDF
Computer Vision and Image Understanding, 114(2):234-244, February 2010. PDF
Obsaženy v tezi
In 10th Asian Conference on Computer Vision (ACCV'10 Workshop), Lecture Notes in Computer Science 2011. PDF
In IEEE International Conference on Computer Vision (ICCV'09), pages 1803-1810, 2009. PDF, Video
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'08), Vols 1-2, pages 234-244, 2008. PDF
In British Machine Vision Conference (BMVC'08), 2008. PDF
In 10th European Conference on Computer Vision (ECCV'08), Lecture Notes in Computer Science, 2008. PDF
In 7th Workshop on Omnidirectional Vision, Camera Networks and Non-classical Cameras (OMNIVIS'07), 2007. PDF
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'07), 2007. PDF
In Computer Vision Winter Workshop (CVWW'07), Graz, Austria, 2007. PDF
Konferenční články vztahujíci se k tezi
In IEEE International Conference on Computer Vision (ICCV'13), Sydney, Australia, 2013. PDF
In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference (AMOS'13), 2013. PDF
In International conference on 3d vision (3DV'13), Seattle, USA, June, 2013. PDF
IIn 11th Asian Conference on Computer Vision (ACCV'12), 2012. PDF, Code
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'12), 2012. PDF
In 10th Asian Conference on Computer Vision (ACCV'10), volume 6492 of Lecture Notes in Computer Science, pages 11-24, 2011. PDF
In 10th Asian Conference on Computer Vision (ACCV'10), volume 6493 of Lecture Notes in Computer Science, pages 216-229, 2011. PDF
In 9th Asian Conference on Computer Vision (ACCV'09), pages 13-24, 2009. PDF
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'08), Vols 1-12, pages 3506-3513, 2008. PDF
Karlovo náměstí 13, 121-35 Praha 2,
Česká Republika
Tel.: +420-224-355-725
Fax: +420-224-357-385
ICQ: 213-365-550
E-mail: kukelova(at)cmp.felk.cvut.cz
Centrum strojového vnímání
Katedra kybernetiky
Fakulta elektrotechnická
České vysoké učení technické v Praze