Surgical Tool Localization in 3D Ultrasound Images
Motivation
|
During surgical interventions, small instruments are often introduced into the body with ultrasound guidance:
Aim si to develop an automatic localization method in 3D ultrasound images which shows the location of the tool in surrounding tissue. |
|
|
| Figure 1 | Figure 2 |


Proposed Methods
|
Assumptions:
|
|
|
Localization method consists of two steps:
|
|
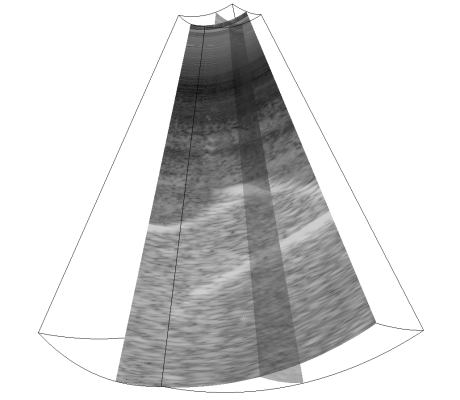
| Figure 3 - 3D ultrasound image of PVA cryogel phantom submerged into water. Inside the phantom there was a tungsten electrode. Moving the mouse cursor over the image shows the result of localization marked by red line. | |
Results
|
Testing datasets can be obtained on
this webpage. There are simulated data and real ultrasound data. |
|||||||||||||||||||||||||
|
Comparison of localization algorithms on the PVA phantom data (Figure 3):
Comparison of localization algorithms on real data of the breast biopsy (Figure 4):
MR PIP = Multi-resolution PIP
[3] |
|
||||||||||||||||||||||||
|
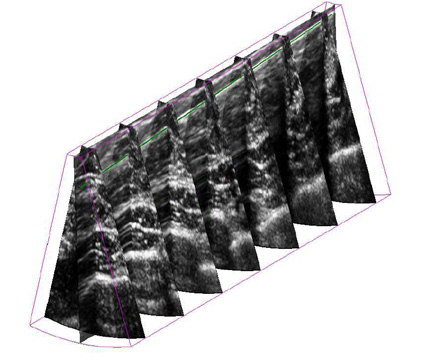
Figure 4 - 3D view of data from the breast biopsy with a localized needle marked by green color line. |
|||||||||||||||||||||||||
Demonstration Applications
|
Real-time tool localization in 3D US implemented on Ultrasonix scanner [4]
|
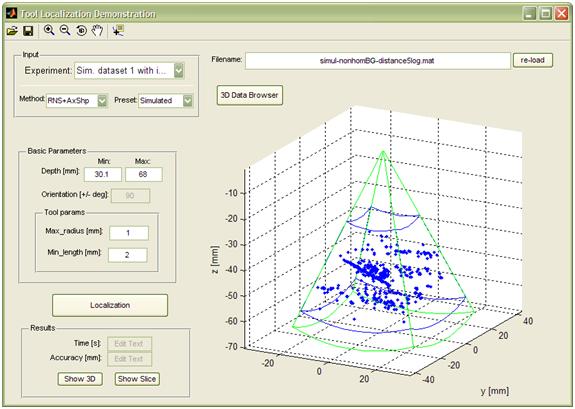
GUI application for testing of various tool localization methods in 3D US
|

Selected Publications
-
M. Barva, M. Uherčík, J.-M. Mari, J. Kybic, J.-R. Duhamel, H. Liebgott, V. Hlaváč, C. Cachard: Parallel Integral Projection Transform for Straight Electrode Localization in 3D Ultrasound Images, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control (UFFC), pp. 1559-1569, July 2008
-
M. Uherčík, J. Kybic, H. Liebgott, C. Cachard: Model Fitting using RANSAC for Surgical Tool Localization in 3D Ultrasound Images, IEEE Transactions on Biomedical Engineering (BME), pp. 1907-1916, Aug. 2010.
-
M. Uherčík, J. Kybic, H. Liebgott, C. Cachard: Multi-resolution Parallel Integral Projection for Fast Localization of a Straight Electrode in 3D Ultrasound Images, IEEE International Symposium on Biomedical Imaging (ISBI), pp. 33-36, May 2008.
-
F. Gaufillet, H. Liebgott, M. Uherčík, F. Cervenansky, J. Kybic, and C. Cachard: 3D ultrasound real-time monitoring of surgical tools. In IEEE International Ultrasonics Symposium (IUS), October 2010.