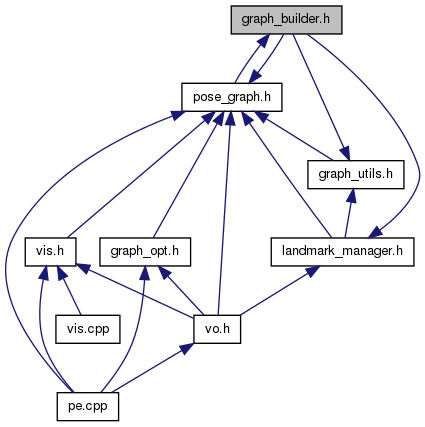
Contains code that performs functionality of Node Builder, Node Destroyer, Edge Builder and Landmark Manager (which are components of Main Data Structure). More...
#include "pose_graph.h"#include "graph_utils.h"#include "landmark_manager.h"#include "emat_estimation.h"#include "grid.h"#include <algorithm>#include <tr1/functional>#include <string>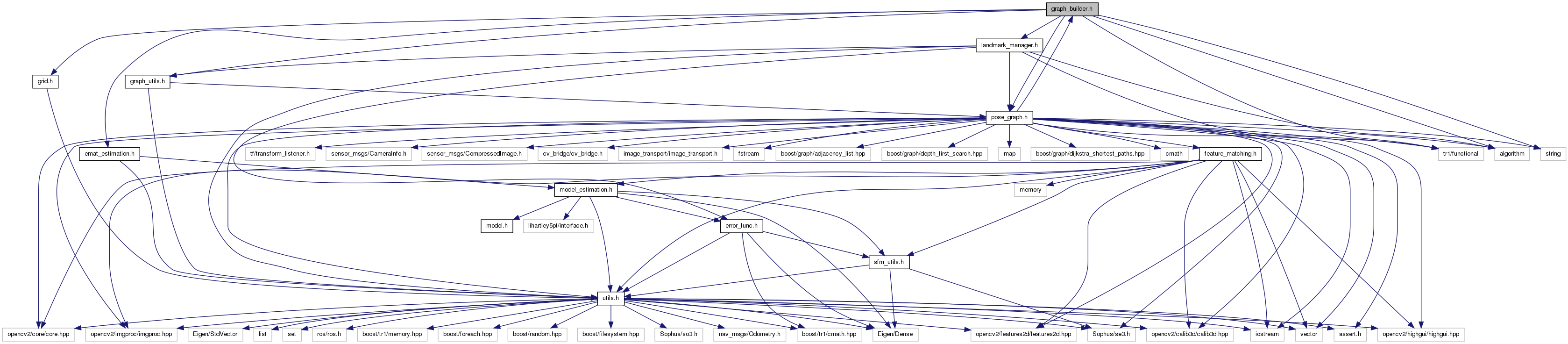
Go to the source code of this file.
Namespaces | |
| namespace | vslam |
Namespace containing implementation of visual odometry. | |
Functions | |
| std::tr1::shared_ptr < RobustFeatureMatcher > | vslam::constructRMatcher (std::tr1::shared_ptr< cv::DescriptorMatcher > _dmatcher, std::tr1::shared_ptr< EMatrixModelBuilder > _minbuilder, std::tr1::shared_ptr< EMatrixModelBuilder > _builder) |
| template<class PoseGraphT > | |
| void | vslam::findLocalMatchesSE3 (const PoseGraphT &g, typename graph_traits< PoseGraphT >::vertex_descriptor vd1, typename graph_traits< PoseGraphT >::vertex_descriptor vd2, shared_ptr< RobustFeatureMatcher > rmatcher, vector< cv::DMatch > &matches) |
| Performs guided matching. | |
| template<class PoseGraphT > | |
| void | vslam::findLocalMatchesSO3 (const PoseGraphT &g, typename graph_traits< PoseGraphT >::vertex_descriptor tvd, typename graph_traits< PoseGraphT >::vertex_descriptor qvd, shared_ptr< RobustFeatureMatcher > rmatcher, Vector2d grid_dim, bool skip_landmarks, vector< cv::DMatch > &matches) |
| template<class ErrorAccumT > | |
| ErrorAccumT::ErrorT | vslam::outlierRemoval (const Matrix3d &E, const ErrorAccumT &ea, const ImageMatchVec &matches_c1c2, const vector< cv::DMatch > &dmatches_c1c2, vector< cv::DMatch > &filtered_matches_c1c2) |
| Outlier Removal for image correspondences in 2-view geometry given by an essential matrix. | |
| template<class G > | |
| void | vslam::setRelTranslationError (double r_min, double r_max, typename graph_traits< G >::vertex_descriptor vs, typename graph_traits< G >::vertex_descriptor vt, G &g) |
Contains code that performs functionality of Node Builder, Node Destroyer, Edge Builder and Landmark Manager (which are components of Main Data Structure).
Interface and some functionality is already contained in pose_graph.h. Some more general utility procedures for work with pose-graph are already in graph_utils.h.
Contains all stuff that is needed to be included for accessing Main Data Structure.
Definition in file graph_builder.h.

