Interface for Main Data Structure. More...
#include "utils.h"#include "tf/transform_listener.h"#include "sensor_msgs/CameraInfo.h"#include "sensor_msgs/CompressedImage.h"#include "cv_bridge/cv_bridge.h"#include "image_transport/image_transport.h"#include "Sophus/se3.h"#include "feature_matching.h"#include <vector>#include <string>#include <iostream>#include <fstream>#include <opencv2/core/core.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/features2d/features2d.hpp>#include <opencv2/calib3d/calib3d.hpp>#include <assert.h>#include <algorithm>#include <boost/graph/adjacency_list.hpp>#include <boost/graph/depth_first_search.hpp>#include <map>#include <boost/graph/dijkstra_shortest_paths.hpp>#include <cmath>#include <tr1/functional>#include "graph_builder.h"
Go to the source code of this file.
Classes | |
| class | vslam::AllWeightsOneWeightMap< PoseGraphT > |
| property map that represents edge weights in the graph, where all edges have weight 1. More... | |
| class | vslam::CustomOneDetectorNodeBuilder< PoseGraphT > |
| class | vslam::CustomOneDetectorNodeBuilderFeature2D< PoseGraphT > |
| class | vslam::EdgeBuilder< G > |
| Interface for adding edges to the pose-graph. More... | |
| class | vslam::FeatureID< G > |
| unique identification af landmark observation (feature) in the pose-graph. More... | |
| class | vslam::MonoFtrClassEdgeBuilder< G > |
| Implementation of EdgeBuilder, where there is only one kind of feature detector-descriptor pair. More... | |
| class | vslam::NMSOptions |
| Set up non-maxima supression (NMS) functionality of OneDetectorNodeBuilder. More... | |
| class | vslam::OneDetectorNodeBuilder< PoseGraphT > |
| Interface for adding and removing nodes in the pose-graph. More... | |
| class | vslam::PerformanceLogger< G > |
| Records time elapsed between construction and destruction of this object. More... | |
| class | vslam::Points< G > |
| struct | boost::property_traits< vslam::AllWeightsOneWeightMap< PoseGraphT > > |
| property map that represents edge weights in the graph, where all edges have weight 1. More... | |
| class | vslam::VertexDebugInfo |
| Debugging info for a vertex. More... | |
Namespaces | |
| namespace | boost |
?? | |
| namespace | vslam |
Namespace containing implementation of visual odometry. | |
| namespace | vslam::lmdetails |
Implementation details of Landmark Manager module. | |
Typedefs | |
| typedef ALIGNED< pair< int, Vector3d > >::vector | vslam::IdxPoint3dVec |
| typedef graph_traits < PoseGraph >::edge_descriptor | vslam::PGEdgeD |
| typedef graph_traits < PoseGraph > ::vertex_descriptor | vslam::PGVertexD |
| typedef boost::adjacency_list < boost::vecS, boost::vecS, boost::directedS, boost::property< vertex_kp_t, std::vector< cv::KeyPoint > , boost::property < vertex_desc_t, cv::Mat, boost::property < vertex_fix_idx_t, vector < int >, boost::property < vertex_seq_t, int, boost::property < boost::vertex_keyframe_flag_t, int, boost::property < boost::vertex_debug_info_t, VertexDebugInfo, boost::property < boost::vertex_timestamp_t, uint64_t, boost::property < vertex_transform_t, SE3 > > > > > > > >, boost::property < edge_kp_idx_map_t, map< int, int >, boost::property < edge_transform_t, SE3, boost::property < edge_rel_scale_error_t, double > > > > | vslam::PoseGraph |
| representation of a pose-graph. | |
Enumerations | |
| enum | boost::edge_kp_idx_map_t { boost::edge_kp_idx_map = 201 } |
| matches between keypoints More... | |
| enum | boost::edge_rel_scale_error_t { boost::edge_rel_scale_error = 203 } |
| enum | boost::edge_transform_t { boost::edge_transform = 202 } |
| T_c1_c2. More... | |
| enum | boost::graph_points_t { boost::graph_points = 301 } |
| enum | boost::vertex_debug_info_t { boost::vertex_debug_info = 107 } |
| debugging information stored with this vertex. More... | |
| enum | boost::vertex_fix_idx_t { boost::vertex_fix_idx = 103 } |
| Stores array landmark indexes. More... | |
| enum | boost::vertex_keyframe_flag_t { boost::vertex_keyframe_flag = 106 } |
| Is vertex a keyframe? More... | |
| enum | boost::vertex_seq_t { boost::vertex_seq = 104 } |
| Stores unique identifier of a vertex. More... | |
| enum | boost::vertex_timestamp_t { boost::vertex_timestamp = 108 } |
| ROS timestamp (for the image represented by this vertex. More... | |
| enum | boost::vertex_transform_t { boost::vertex_transform = 105 } |
| stores T_wc for pose corresponding to this vertex. 'c' signifies camera CF of the pose. More... | |
Image representation | |
Each image is reduced into an array of keypoints and array of descriptors. The indices in the arrays correspond to feature id in a given vertex and pose-graph uniquie feature id if given by FeatureID. | |
| enum | boost::vertex_kp_t { boost::vertex_kp = 101 } |
| Stored array of keypoints. More... | |
| enum | boost::vertex_desc_t { boost::vertex_desc = 102 } |
| stores array of vertex descriptors More... | |
Functions | |
| boost::BOOST_INSTALL_PROPERTY (vertex, kp) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, desc) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, fix_idx) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, seq) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, transform) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, keyframe_flag) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, debug_info) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, timestamp) | |
| boost::BOOST_INSTALL_PROPERTY (edge, kp_idx_map) | |
| boost::BOOST_INSTALL_PROPERTY (edge, transform) | |
| boost::BOOST_INSTALL_PROPERTY (edge, rel_scale_error) | |
| boost::BOOST_INSTALL_PROPERTY (graph, points) | |
| std::tr1::shared_ptr < RobustFeatureMatcher > | vslam::constructRMatcher (std::tr1::shared_ptr< cv::DescriptorMatcher > _dmatcher, std::tr1::shared_ptr< EMatrixModelBuilder > _minbuilder, std::tr1::shared_ptr< EMatrixModelBuilder > _builder) |
| template<class PoseGraphT > | |
| int | vslam::get (AllWeightsOneWeightMap< PoseGraphT > pmap, typename boost::property_traits< AllWeightsOneWeightMap< PoseGraphT > >::key_type vd) |
| interface for property map that represents edge weights in the graph, where all edges have weight 1. | |
| template<class G > | |
| bool | vslam::isLandmakFeature (const G &g, const FeatureID< G > &fid) |
| Test if given feature has landmark associated with it. | |
Variables | |
| const int | vslam::BAD_INDEX = -1 |
| value for undefined array index. | |
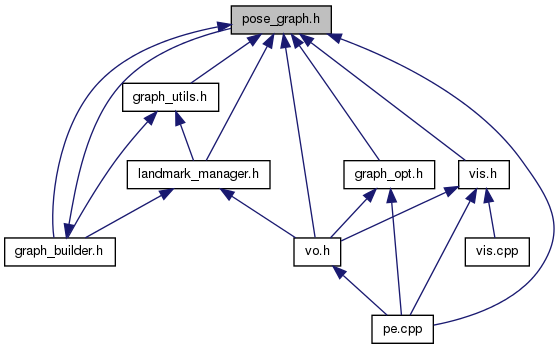
Interface for Main Data Structure.
Contains necessary forward declarations for graph_builder.h, which should be included in code that wants to use Main Data Structure.
Definition in file pose_graph.h.

