Classes |
| struct | ALIGNED< T1, T2 > |
| struct | EigenAllocTraits< T > |
| struct | EigenAllocTraits< Vector3d > |
| class | ImageCoordinate< ImageParamsObj > |
| class | Maybe< T > |
| | XXX use pointer instead?? XXX not used?? More...
|
| class | PanoramaParams |
| class | SingleVariableWrapper< T > |
| class | SpeedAsNaturalNumber |
| struct | SpeedSegment |
| class | TimeAsNaturalNumber |
Namespaces |
| namespace | vslam |
| | Namespace containing implementation of visual odometry.
|
Defines |
| #define | EIGEN_DISABLE_UNALIGNED_ARRAY_ASSERT |
| #define | EIGEN_DONT_ALIGN |
| #define | ROSCONSOLE_MIN_SEVERITY ROSCONSOLE_SEVERITY_DEBUG |
Typedefs |
typedef ALIGNED< std::pair
< int, Eigen::Vector2d >
>::vector | IdxPoint2dVec |
typedef ALIGNED< std::pair
< int, Eigen::Vector3d >
>::vector | IdxPoint3dVec |
| typedef vector< PanoImCoord > | ImageCoordinateVec |
typedef std::pair
< Eigen::Vector3d,
Eigen::Vector3d > | ImageMatch |
typedef ALIGNED< ImageMatch >
::vector | ImageMatchVec |
typedef ImageCoordinate
< PanoramaParams > | PanoImCoord |
typedef Eigen::Matrix< double,
3, Eigen::Dynamic > | PointMatrix |
typedef ALIGNED
< Eigen::Vector2d >::vector | Points2dSTL |
typedef ALIGNED
< Eigen::Vector3d >::vector | Points3dSTL |
Functions |
| ImageMatchVec | buildImageMatchesFrom3dPoints (const SE3 &T_wc1, const SE3 &T_wc2, const Points3dSTL &points) |
| Vector2d | c1PixelToc2Pixel (const SE3 &T_c1c2, const Vector2d &pixel1) |
| ImageMatch | computeMatch (const Vector2d &px_c1, const Vector2d &px_c2) |
| void | constructTrajectoryFromSpeedSegments (std::vector< SpeedSegment > speed_segments, ALIGNED< SE3 >::vector &transforms) |
| Vector3d | coordFrameConventionLocalToROS (const Vector3d &vec) |
| SE3 | coordFrameConventionLocalToROS (const SE3 &T) |
| template<class T > |
| cv::Point | cvPointFromVector2 (Eigen::Matrix< T, 2, 1 > vec) |
| void | generateLineTrajectory (const Vector3d &start, const Vector3d &end, int num_stops, ALIGNED< SE3 >::vector &transforms) |
| | XXX move to testutils.
|
| void | generateRandomScene (const Vector3d &upper_left_deep, const Vector3d &bottom_right_shallow, double target_num_vec, Points3dSTL &points) |
| | XXX move to testutils.
|
| void | generateRandomTrajectory (const Vector3d &upper_left_deep, const Vector3d &bottom_right_shallow, int num_stops, ALIGNED< SE3 >::vector &transforms) |
| | XXX move to testutils.
|
| template<class T > |
| vector< T > | getArrayIdices (const vector< T > &array, const vector< int > &idxs) |
| | select indexes from an array,
|
| template<class T > |
| cv::Mat | getArrayIdices (const cv::Mat &mat, const vector< int > &idxs) |
| | select rows from a matrix.
|
| template<template< class, class > class C1, template< class, class > class C2, class T1 , class T2 , template< class > class A1, template< class > class A2> |
C1< pair< T1, T2 >, A1< pair
< T1, T2 > > > | getByIdx (const C1< pair< T1, T2 >, A1< pair< T1, T2 > > > &pts, const C2< T1, A2< T1 > > &idx) |
| | Select values with given sorted indexes from index-value pairs sorted by index.
|
| template<class C1 , class C2 > |
| C1 | getCommon (const C1 &idx1, const C2 &idx2) |
| | Get indexes that are common to both index sequrces.
|
| template<class T1 , class T2 > |
| T1 | getFirst (const pair< T1, T2 > &pair) |
| | get pair.first
|
| geometry_msgs::Pose | getPoseFromTcwInSE3 (const SE3 &T_cw) |
| template<class T1 , class T2 > |
| T2 | getSecond (const pair< T1, T2 > &pair) |
| | get pair.second
|
| Vector2d | homogenousToPixel (const Vector3d &hom) |
| ImageMatchVec | imageMatchCoords (const vector< cv::KeyPoint > &tkpts, const vector< cv::KeyPoint > &qkpts, const std::vector< cv::DMatch > &matches) |
| template<template< class, class > class C1, template< class, class > class C2, template< class > class Alloc1, template< class > class Alloc2, class TK , class TV > |
list< pair< TK, TV >, Alloc2
< pair< TK, TV > > > | indexBy (const C1< TK, Alloc1< TK > > &idx, const C2< TV, Alloc2< TV > > &points) |
| | Typical zip function from functional programmming languages.
|
| template<class T > |
| T | inv_linspace_idx (T first, T last, int count, T val) |
| template<template< class, class > class C1, template< class, class > class C2, class T , class A > |
| list< T > | inverse_idxs (const C1< T, A > &idx, const C2< T, A > &all_idx) |
| | returns indexes present in all_idx and not present in idx. Both containers have to be sorted.
|
| bool | isApprox (double num, double target_num, double error) |
| template<class T > |
| T | linspace_idx (T first, T last, int count, T idx) |
| template<class T > |
| list< T > | makeSeq (T first, T last, T step) |
| | make sequence of numbers with numeric type given by T.
|
| template<template< class, class, class, class > class M, class V , class K , class Cmp , template< class > class Alloc> |
list< pair< K, V >, Alloc
< pair< K, V > > > | mapToList (const M< K, V, Cmp, Alloc< pair< const K, V > > > &map) |
| | map key-value pairs from map to list of key-value pairs. Allocators remain the same.
|
| template<template< class T, class=std::allocator< T > > class C, class T > |
| C< T > | mkContainer (const T &val) |
| template<template< class, class > class C, class T > |
| C< T, std::allocator< T > > | mkOneValueCont (const T &value) |
| template<template< class, class > class C, class T > |
C< T, Eigen::aligned_allocator
< T > > | mkOneValueContAA (const T &value) |
| void | points3dSTLToPointMatrix (const Points3dSTL &pts, PointMatrix &ptmat) |
| template<class Iterator > |
| void | printContainer (Iterator b, Iterator e, const char *separator) |
| Points3dSTL | projectPoints (SE3 T_sd, const Points3dSTL &points) |
| Matrix3d | sE3ToE (const SE3 &T) |
| | essential matrix from SE3 transform.
|
| std::string | seqencedName (int seq, std::string name) |
| | scheduled for removal XXX. Probably still used.
|
| template<template< class, class > class CT, template< class, class > class CS, class T , template< class > class Alloc> |
| CT< T, Alloc< T > > | switchCont (const CS< T, Alloc< T > > &container) |
| | swich storage container form container type CS to container type CT. Allocators remain the same.
|
| template<class TR , template< class, class > class C, template< class > class A, class T > |
C< TR, typename
EigenAllocTraits< TR >::alloc > | transformF (const C< T, A< T > > &container, TR(*f)(const T &)) |
| | Transforms values using given function.
|
| template<class T > |
| bool | truePred (const T &t) |
Variables |
| const double | PI = std::atan(1.0)*4 |
| boost::mt19937 | rng_mt19937 |
| | pseudorandom number generator.
|
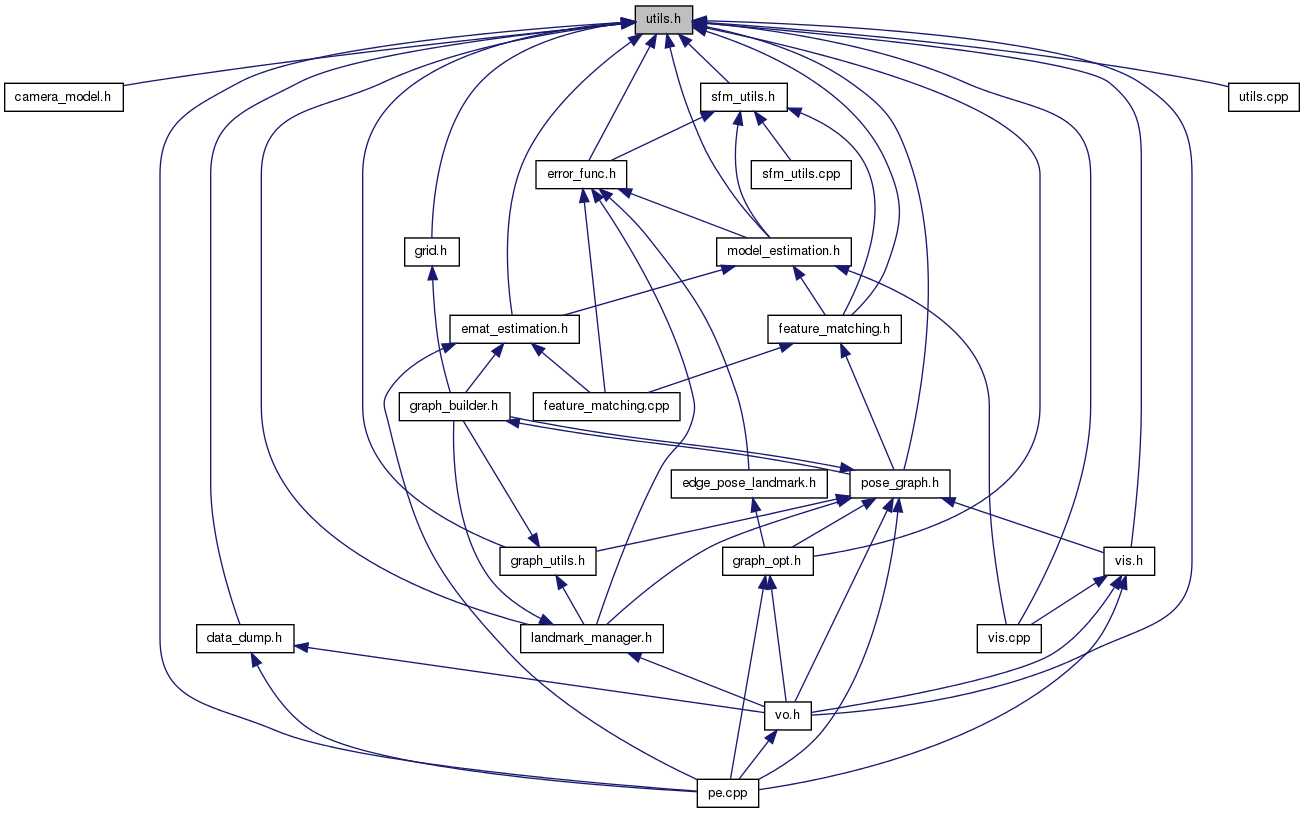
Universal, globally useful definitions in vslam namespace.
This file is intended to be included by all other sources in vslam namespace.
Definition in file utils.h.