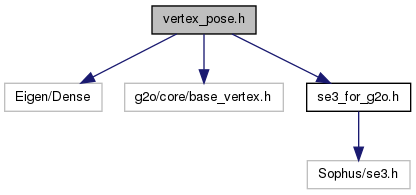
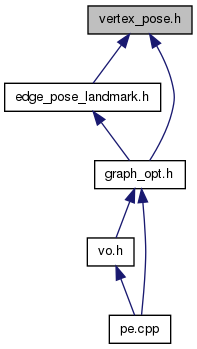
Camera pose vertex for g2o framework. More...
Go to the source code of this file.
Classes | |
| class | vslam::g2o_types::VertexSE3< PoseGraphT > |
| Represents pose variable (vertex) in g2o graph. More... | |
Namespaces | |
| namespace | vslam |
Namespace containing implementation of visual odometry. | |
| namespace | vslam::g2o_types |
types that for g2o framework that are specific to our task. | |
Camera pose vertex for g2o framework.
Definition in file vertex_pose.h.

