
Tomáš Hodaň
Research Scientist, Reality Labs at Meta
Curriculum vitae |
Google Scholar |
LinkedIn |
GitHub |
Twitter
tomhodan@meta.com
I am a Research Scientist at Reality Labs at Meta in Zurich. My research is focused on computer vision, mostly on 3D tracking of objects and hands. Prior to joining Meta in 2020, I received my PhD under the supervision of Prof. Jiří Matas at the Czech Technical University in Prague, during which I worked on object pose estimation (EPOS, T-LESS), synthesis of effective training data (ObjectSynth, BlenderProc), and started co-organizing the BOP benchmark and the R6D workshops. Some of this work is coming from my internships at Microsoft Research in Redmond and Google in Munich. Prior to that, I obtained my Bachelor's and Master's degree from the Brno University of Technology. I received the Rector's Prize for an outstanding PhD thesis and the Dean's Prize for an excellent Master's thesis.
NEWS (show more)
- 07/06/2023 - BOP Challenge 2023 has been opened!
- 04/19/2023 - Organizing the 8th Workshop on Recovering 6D Object Pose at ICCV 2023 in Paris on October 3, 2023.
- 02/27/2023 - Two papers accepted to CVPR 2023 (In-hand 3D object scanning from RGB and AssemblyHands).
- 02/25/2023 - A report about BOP Challenge 2022 is on arXiv and will published at CV4MR workshop at CVPR 2023.
- 01/16/2023 - Received the Rector's Prize for an outstanding PhD thesis.
- 07/08/2022 - Neural Correspondence Field accepted to ECCV 2022 in Tel-Aviv.
- 05/01/2022 - BOP Challenge 2022 has been opened.
- 05/01/2022 - Organizing the 7th Workshop on Recovering 6D Object Pose at ECCV 2022 in Tel-Aviv.
- 03/01/2022 - LISA, our neural hand model, accepted to CVPR 2022 in New Orleans.
- 07/07/2021 - PhD defended! A recording of the defense is available on YouTube.
- 11/02/2020 - Joining Facebook Reality Labs in Redmond as a Research Scientist.
- 10/02/2020 - Code and pre-trained models of EPOS are available on GitHub.
- 09/15/2020 - An analysis of the BOP Challenge 2020 results is now available in an ECCVW 2020 paper.
- 07/12/2020 - A paper about BlenderProc accepted to the sim2real workshop at RSS 2020.
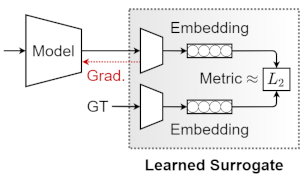
- 07/03/2020 - A paper on learning surrogates accepted to ECCV 2020.
- 06/05/2020 - BOP Challenge 2020 has been announced, together with BlenderProc4BOP, a new PBR renderer.
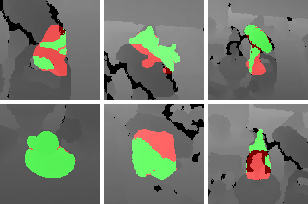
- 04/01/2020 - EPOS, our CVPR 2020 paper, is now available on arXiv.org.
- 02/16/2020 - Organizing the 6th Workshop on Recovering 6D Object Pose at ECCV 2020 in Glasgow.
- 11/17/2019 - Photorealistic synthetic images from our ICIP'19 paper have been released.
- 07/26/2019 - BOP Challenge 2019 has been opened.
- 05/20/2019 - Invited talk at Siemens AG Research & Technology Center in Munich.
- 05/01/2019 - Organizing the 5th Workshop on Recovering 6D Object Pose at ICCV 2019 in Seoul.
- 04/30/2019 - Our paper with Microsoft Research accepted to ICIP 2019 in Taipei.
- 11/19/2018 - Internship at Google in Munich, working with Stefan Hinterstoisser.
- 09/09/2018 - Organizing the 4th Workshop on Recovering 6D Object Pose at ECCV 2018 in Munich.
- 07/03/2018 - Our BOP paper accepted to ECCV 2018 in Munich.
- 06/04/2018 - Internship at Microsoft Research in Redmond, working with Vibhav Vineet, Sudipta Sinha, Brian Guenter.
- 08/11/2017 - Colloquium talk about 6D object pose estimation at the Tampere University of Technology.
- 05/06/2017 - Organizing the 3rd Workshop on Recovering 6D Object Pose at ICCV 2017 in Venice.
- 03/28/2017 - T-LESS presented at WACV 2017 in Santa Rosa.
PhD THESIS

Supervisor: Prof. Jiří Matas
Reviewers: Prof. Vincent Lepetit, Prof. Markus Vincze, Dr. Slobodan Ilic
Czech Technical University in Prague, 2021
Received the Rector's Prize for an outstanding PhD thesis
SELECTED PUBLICATIONS (see my Google Scholar profile for a full list)


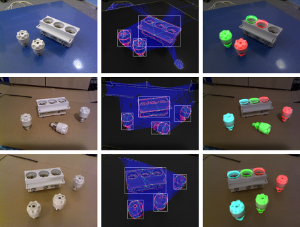
BOP: Benchmark for 6D Object Pose Estimation
European Conference on Computer Vision (ECCV) 2018, Munich

ORGANIZED WORKSHOPS ON RECOVERING 6D OBJECT POSE
8th edition (ICCV 2023, Paris), 7th edition (ECCV 2022, Tel-Aviv), 6th edition (ECCV 2020, Glasgow), 5th edition (ICCV 2019, Seoul), 4th edition - summary (ECCV 2018, Munich), 3rd edition (ICCV 2017, Venice), 2nd edition (ECCV 2016, Amsterdam), 1st edition (ICCV 2015, Santiago)
RESEARCH REPORTS
T. Hodaň, R. Kouskouridas, T.-K. Kim, F. Tombari, K. Bekris, B. Drost, T. Groueix, K. Walas, V. Lepetit, A. Leonardis, C. Steger, F. Michel, C. Sahin, C. Rother, J. Matas
A Summary of the 4th International Workshop on Recovering 6D Object Pose
European Conference on Computer Vision Workshops (ECCVW) 2018, Munich
PROJECTS
BlenderProc4BOP - An open-source, light-weight, procedural and photorealistic (PBR) renderer.
DARWIN - A dexterous assembler robot working with embodied intelligence.
TEACHING
Pattern Recognition and Machine Learning (2013-2018) - a course at Faculty of Electrical Engineering, CTU