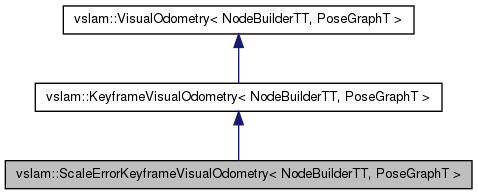
Keyframe policy based on accuraccy of scale estimate. After the acuraccy decreases new keyframe is created. More...
#include <vo.h>
Public Member Functions | |
| virtual bool | buildNewKeyframe () |
| decides if current frame should be keyframe. | |
| virtual void | newKeyframeBuilt () |
| stuff that needs to be done after creating new keyframe. | |
| ScaleErrorKeyframeVisualOdometry (shared_ptr< NodeBuilderTT< PoseGraphT > > _nbuilder, shared_ptr< EdgeBuilder< PoseGraphT > > _ebuilder, size_t _target_past_verticies_size, shared_ptr< VodomLogger< PoseGraphT > > _logger=shared_ptr< VodomLogger< PoseGraphT > >()) | |
Protected Types | |
| typedef graph_traits < PoseGraphT > ::vertex_descriptor | VertexD |
Protected Attributes | |
| int | asc_count |
| int | count |
| VertexD | current_keyframe |
| double | error |
| bool | initial_pose_registred |
| int | k |
| number of succesive error increases after which new keyframe is created. | |
| double | prev_error |
Keyframe policy based on accuraccy of scale estimate. After the acuraccy decreases new keyframe is created.
typedef graph_traits<PoseGraphT>::vertex_descriptor vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::VertexD [protected] |
Reimplemented from vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
| vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::ScaleErrorKeyframeVisualOdometry | ( | shared_ptr< NodeBuilderTT< PoseGraphT > > | _nbuilder, |
| shared_ptr< EdgeBuilder< PoseGraphT > > | _ebuilder, | ||
| size_t | _target_past_verticies_size, | ||
| shared_ptr< VodomLogger< PoseGraphT > > | _logger = shared_ptr<VodomLogger<PoseGraphT> >() |
||
| ) | [inline] |
| virtual bool vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::buildNewKeyframe | ( | ) | [inline, virtual] |
decides if current frame should be keyframe.
Implements vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
| virtual void vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::newKeyframeBuilt | ( | ) | [inline, virtual] |
stuff that needs to be done after creating new keyframe.
Implements vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
int vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::asc_count [protected] |
int vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::count [protected] |
VertexD vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::current_keyframe [protected] |
Reimplemented from vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
double vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::error [protected] |
bool vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::initial_pose_registred [protected] |
Reimplemented from vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
int vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::k [protected] |
double vslam::ScaleErrorKeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >::prev_error [protected] |

