All frames are considered keyframes (useful for debugging and testing). More...
#include <vo.h>
Public Member Functions | |
| virtual bool | buildNewKeyframe () |
| decides if current frame should be keyframe. | |
| virtual void | newKeyframeBuilt () |
| stuff that needs to be done after creating new keyframe. | |
| SimpleVisualOdometry (shared_ptr< NodeBuilderTT< PoseGraphT > > _nbuilder, shared_ptr< EdgeBuilder< PoseGraphT > > _ebuilder, size_t _target_past_verticies_size, shared_ptr< VodomLogger< PoseGraphT > > _logger=shared_ptr< VodomLogger< PoseGraphT > >()) | |
All frames are considered keyframes (useful for debugging and testing).
| vslam::SimpleVisualOdometry< NodeBuilderTT, PoseGraphT >::SimpleVisualOdometry | ( | shared_ptr< NodeBuilderTT< PoseGraphT > > | _nbuilder, |
| shared_ptr< EdgeBuilder< PoseGraphT > > | _ebuilder, | ||
| size_t | _target_past_verticies_size, | ||
| shared_ptr< VodomLogger< PoseGraphT > > | _logger = shared_ptr<VodomLogger<PoseGraphT> >() |
||
| ) | [inline] |
| virtual bool vslam::SimpleVisualOdometry< NodeBuilderTT, PoseGraphT >::buildNewKeyframe | ( | ) | [inline, virtual] |
decides if current frame should be keyframe.
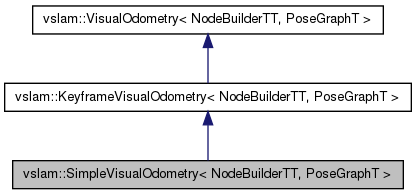
Implements vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.
| virtual void vslam::SimpleVisualOdometry< NodeBuilderTT, PoseGraphT >::newKeyframeBuilt | ( | ) | [inline, virtual] |
stuff that needs to be done after creating new keyframe.
Implements vslam::KeyframeVisualOdometry< NodeBuilderTT, PoseGraphT >.

