Robust motion estimation using RanSaC.RanSaC implementation. RanSaC Model representation. RanSaC Error functions. More...
#include "model.h"#include "error_func.h"#include "utils.h"#include <Eigen/Dense>#include "sfm_utils.h"#include "lihartley5pt/interface.h"
Go to the source code of this file.
Classes | |
| class | AllCombinationsSelector< ContainerT > |
| class | DataSelector< ContainerT > |
| Interface to classes that generate subsets of size k of the data given in constructor. More... | |
| struct | ImageMatchClass |
| class | PairSelectorFromTwoSets< ContainerT > |
| class | Point3dModelFromLandmarkObservationPairBuilder< ErrorAccumClassT > |
| ModelBuilder implemetation for models parametrized as 3D points and constructed from 2 landmark observations. More... | |
| class | RandomDataSelector< ContainerT > |
| class | RanSaCOptions< ErrorAccumClassT > |
| class | ScaleModelBuilder< ErrorAccumClassT > |
| class | ScaleObservation |
| class | ScaleReprojectionError |
Functions | |
| template<class ErrorAccumClassT > | |
| shared_ptr< typename ErrorAccumClassT::ModelClassT > | ranSaC (shared_ptr< ModelBuilder< typename ErrorAccumClassT::ModelClassT > > model_builder, shared_ptr< DataSelector< typename ErrorAccumClassT::ModelClassT::DataVec > > data_selector, const typename ErrorAccumClassT::ModelClassT::DataVec &data) |
| model estimation using ransac. | |
Robust motion estimation using RanSaC.
RanSaC implementation. RanSaC Model representation. RanSaC Error functions.
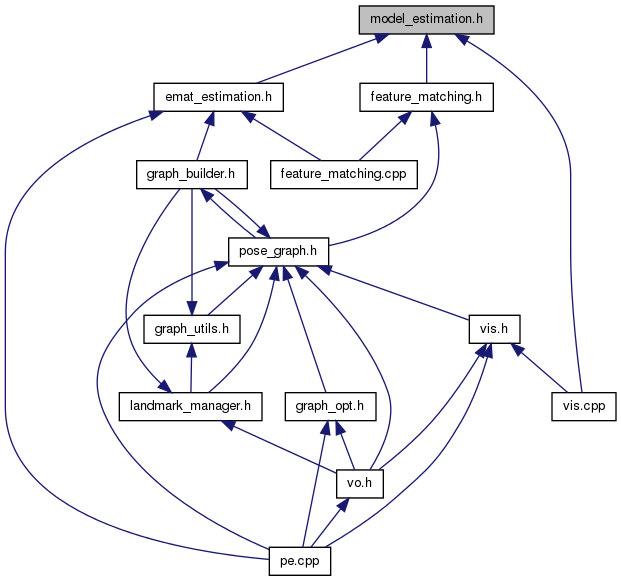
Definition in file model_estimation.h.

